34 / 65 Issued: 29.11.2012 Version: KR C4 Interbus 1.1 V2 en (PDF)
Interbus 1.1
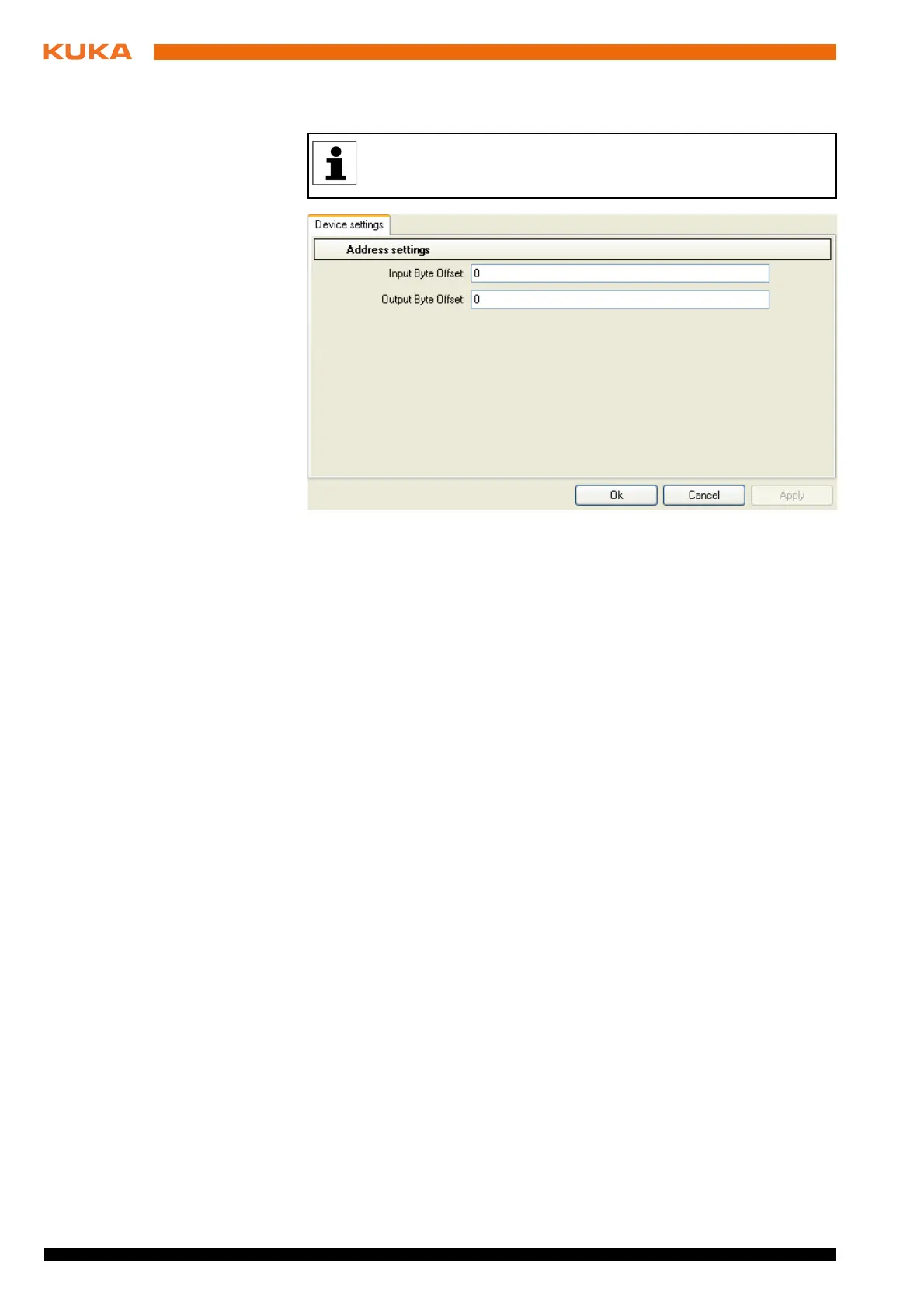
3. Enter the desired offset and confirm it by pressing OK. The device is as-
signed to the specified address.
6.5.6 Entering the IP address of the line interface
Description In order to be able to perform online functions, e.g. a bus scan, the IP address
of the line interface must be entered.
Precondition
A robot controller has been added and set as active.
IBS PCI SC/RI-I-T or IBS PCI SC/RI-LK is added.
Procedure 1. Expand the tree structure of the robot controller on the Hardware tab in
the Project Structure window.
2. Depending on which card is used, right-click on IBS PCI SC/RI-I-T or IBS
PCI SC/RI-LK and select Settings... in the pop-up menu. The Master Set-
tings window opens.
3. Enter the IP address of the line interface and confirm with OK.
Entering “0” as the address allows the devices to be concatenated in
the image. This means that the devices can also be offset as a block
by changing only the address of the 1st device.
Fig. 6-7: Device settings tab