42 / 65 Issued: 29.11.2012 Version: KR C4 Interbus 1.1 V2 en (PDF)
Interbus 1.1
Procedure IOCTL commands can be entered via TELNET or KRL.
TelNet shell:
RETURN VALUE = iosysIoctl (Instance name, REQUEST, Parameter)
KRL interface:
RETURN VALUE = IOCTL (Instance name, REQUEST, Parameter)
Overview of
functions
8.5.1 Generating a dump file
CP_IB_DUMP
The name of the dump file can be specified in the entry DUMPFILE in the
[CONFIGURATION] section of IBSPCI.XML. In this case, all write access op-
erations are recorded on the MPM. The ibsPciDump function can be executed
by means of the IOCTL command CP_IB_DUMP.
8.5.2 Restart
IODRV_IOCTL_RESTART
The Restart command attempts to restart the controller board by means of the
firmware command Start_Data_Transfer_Request. No restart is carried
out if the controller board is still active (even in the event of a periphery fault).
An error message to this effect is sent to the KUKA.HMI and the function is
exited with an error code (ERROR). This informs the user that the controller
board is active, but that there is still a periphery fault.
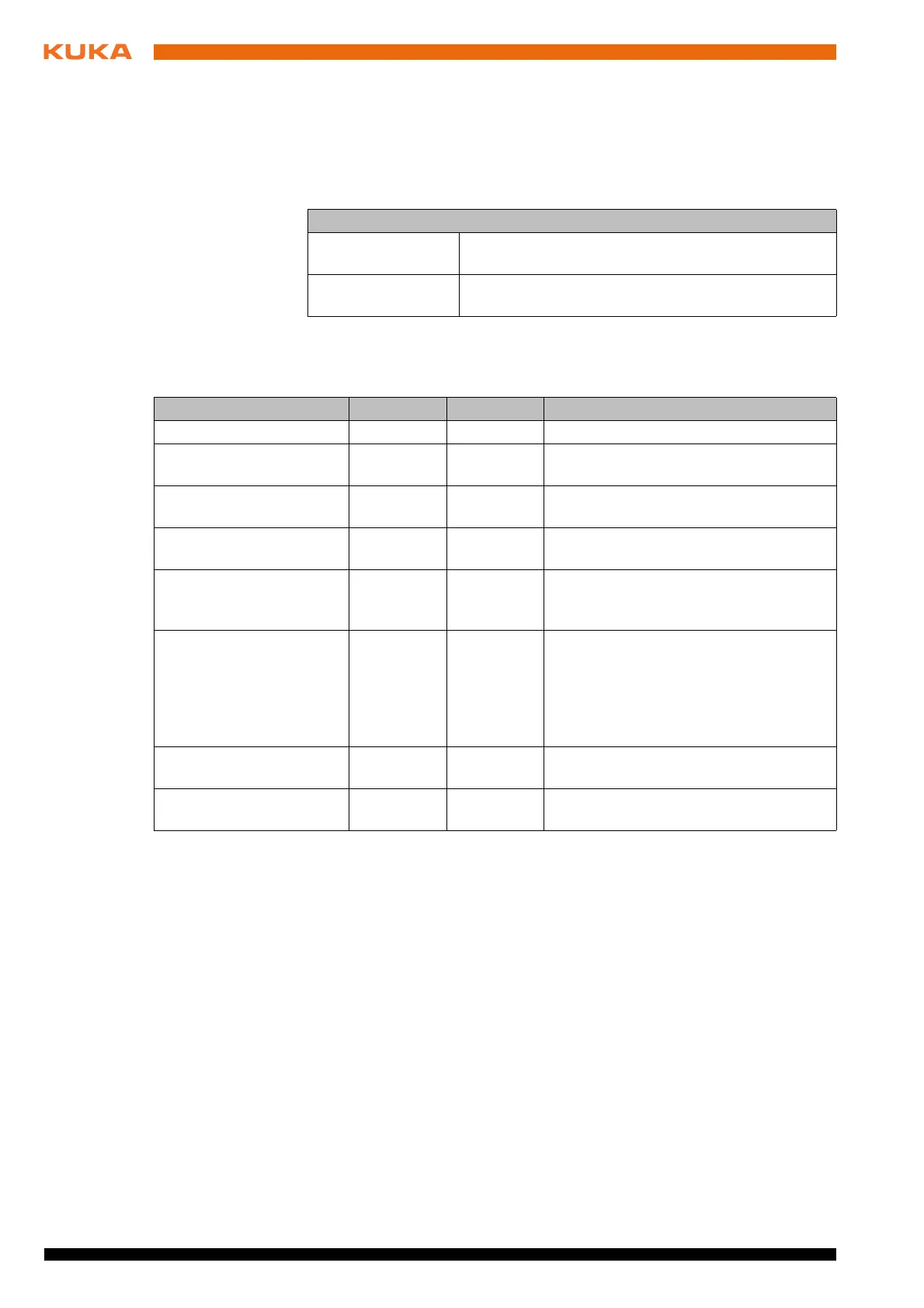
Parameter
Return value Depends on the function (REQUEST number)
called.
Instance name The name of the instance can be found in the Inter-
bus.XML file (parameter busInstanceName).
Entry Request Parameter Function
CP_IB_DUMP 1012 - Creation of a dump file (MPM log file)
IODRV_IOCTL_RESTAR
T
12 - Interbus is stopped, reconfigured and
restarted.
IODRV_IOCTL_ACTIVAT
E_DEVICE
50 Segment Activation of alternative groups
IODRV_IOCTL_DEACTI
VATE_DEVICE
60 Segment Deactivation of alternative groups
IODRV_IOCTL_PRINT_I
NFO
100 - The diagnosis and the parameter regis-
ter of the master and slave are output to
the telnet.
CP_IB_SEND_QUIT_PF 1017 - Sends the message “Acknowledge
periphery faults of all devices” to the
firmware. The system does not wait for
a response from the firmware indicating
whether the command could be exe-
cuted successfully.
CP_IB_GET_SLAVE_ST
ATE
1011 - Contents of the status register of the
slave module
CP_IB_GET_DEVICE_S
TATE
1013 Segment,
position
Current state of a module