4Individualaxisswitch--offforexternalaxes
27 of 70
Hardware R2.2.8 1 1.98.02 en
4Individualaxisswitch--offforexternalaxes
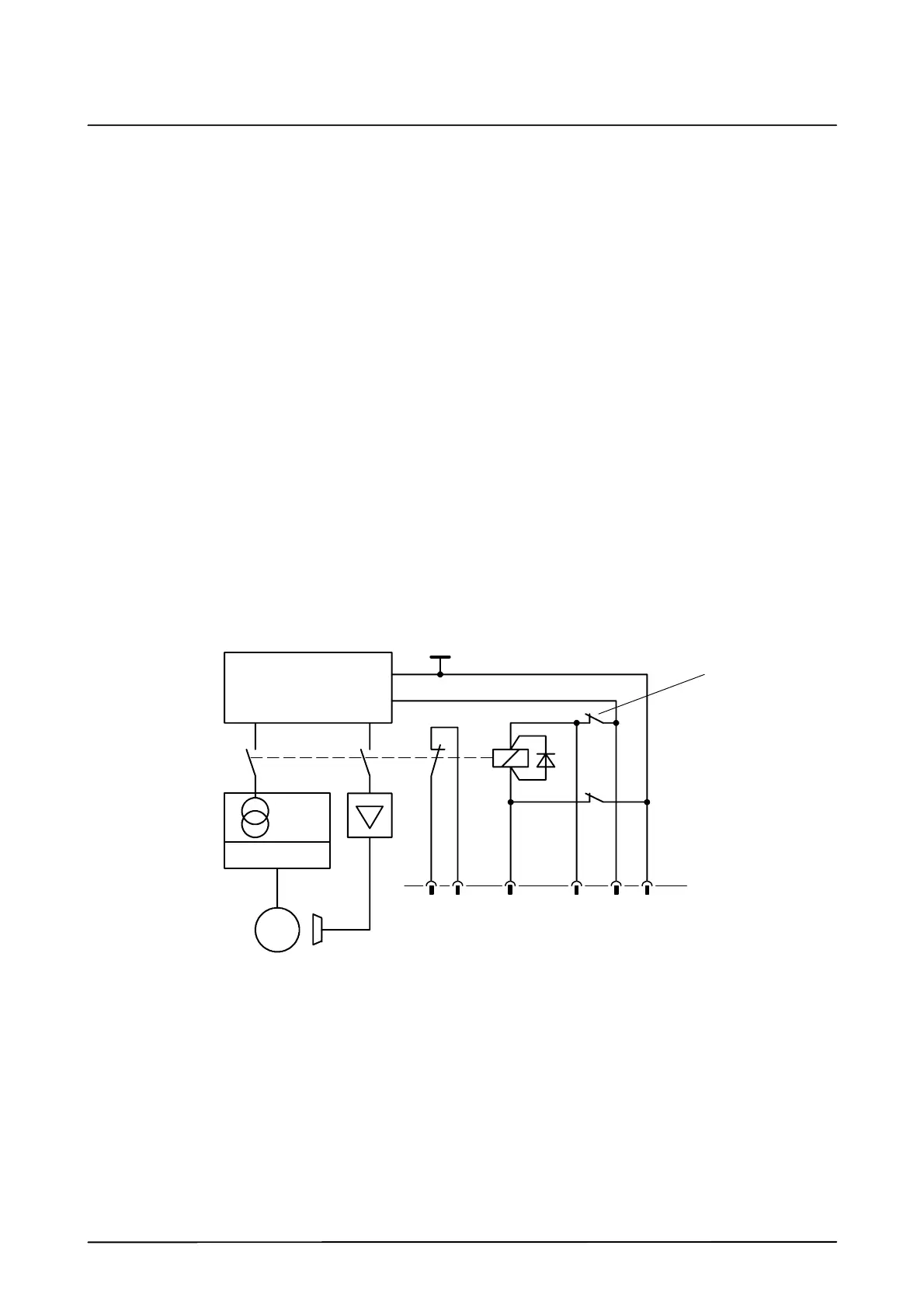
This unit allows the external axis to be switched off independently of the robot axes by means
of hardware. For this purpose, the driver voltage for the converter output stageand the supply
voltage to the brake are disconnected.
The relay of the switch--off unit must be operated and evaluated in a failsafe mode by a
higher--level controller. The switch--off operates on a “low active” basis, i.e. if the relay of the
individual axis switch--off is energized, the axes are enabled. A status signal is provided by
a break contact.
As a precondition for switch--off, the external axis must be positioned in the active program,
the servo enable must be inhibited and the brake applied. The axis may not be moved in the
program for the duration of the axis switch--off.
If the axis switch--off is not required, the relay of the individual axis switch--off must be perma-
nently energized or the hook switches N11 / S2 must be closed. (For the position, see F ig. 6)
Driver stage
IGBT output stage
15V/15kHz 26V--
Peripheral interface
X11 95 60 6261 78 80
Status signal, external axis locked out
Status signal, external axis locked out
Enable external axis 0V
Enable external axis s ignal
+24V internal
0V internal
Power supply
GND
+24V
Brake
External axis motor
M
S2
S3
Hook switches for activating
the individual axis switch--off
S2 closed: switch--off jumpered
S2 open: s witch--off active
Fig. 11 Block diagram of individual axis switch--off