145
The expansion PG2 is set according to the number of pulses per revolution (PPR) of the pulse encoder
(expansion PG2) selected. The pulse encoder is mainly used for the frequency division output or the
position feedback input.
Expansion encoder parameters
0: A before B 1: B before A
When the motor is running forward, A is before B. When the motor is running reversely, B is before A.
When the wiring sequence between the drive interface board and the PG2 has the same direction with
the wiring sequence between the drive and motor, the set value shall adopt “0” (FWD), otherwise, it shall
adopt “1” (REV). The correspondence relation between the wiring directions can be conveniently
adjusted by changing this parameter, and you do not need to rewire the relevant unit.
Note
If this function code is set wrongly, the drive will report the PG fault Er.PG1.
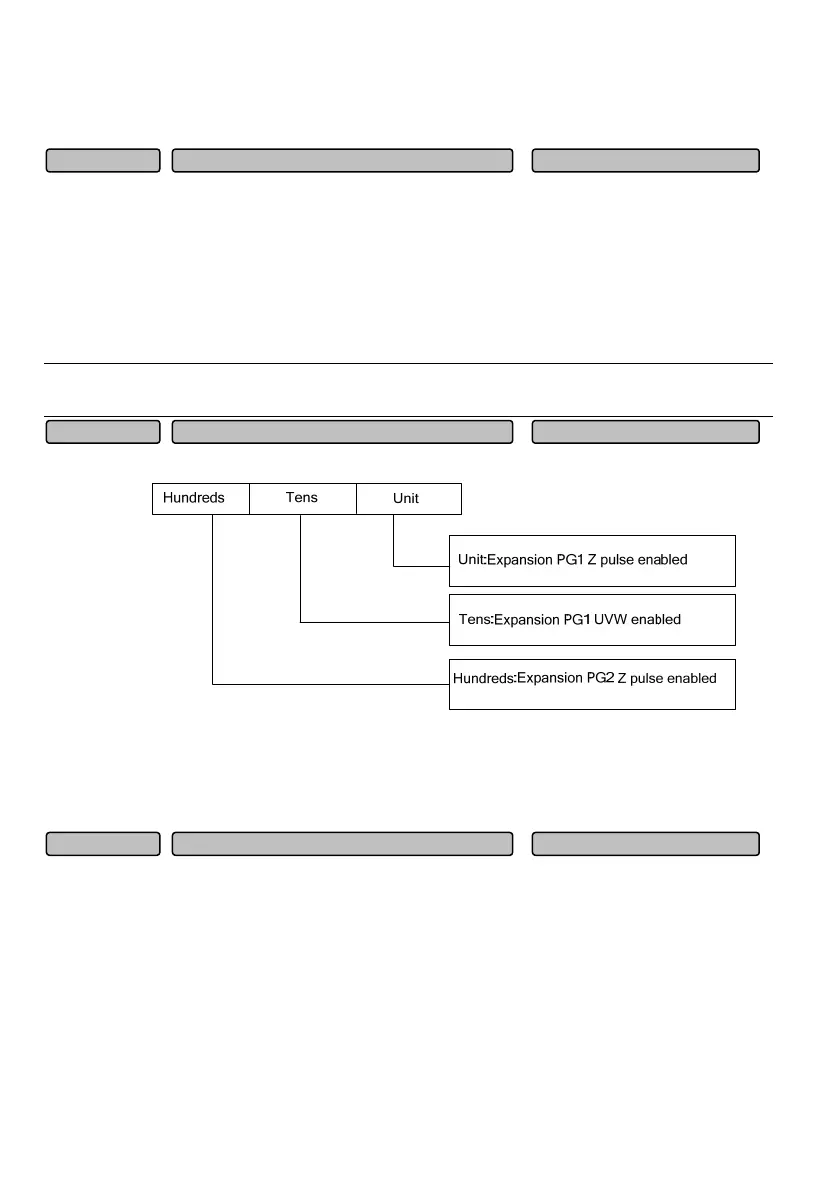
Expansion encoder parameters
Fig. 6-16 Expansion PG signal enabled
As the SinCos and resolver code signal contains the absolute position signal (no additional absolute
position identification signal), if the expansion card interface is incremental type, set it as Z pulse or UVW
signal according to the incremental position.
Expansion encoder parameters
Expansion PG signal filtering coefficient 0000~9999H (0030)P04.10
Expansion PG signal enabled 000~111H (010)P04.09
Rotation direction of expansion PG2 0~1 (0)P04.08
 Loading...
Loading...