127
Corresponding position of local PG2 Z pulse. The value 65535 corresponds to 360°.
Indicating the input pulse frequency of terminal X7.
6.3 Basic parameters (Group P02)
P02: Basic parameters
The group of basic parameters are mainly used to the basic parameters that are necessary for the drive
operation, such as control mode, main/auxiliary frequency reference and calculation,
acceleration/deceleration time, etc. The set frequency of the MV600 drive can be combined by the main
set frequency and the auxiliary set frequency. P02.04~P02.06 are used to define the main set frequency
and P02.07~P02.09 are used to define the auxiliary frequency. The Fig. 6-5 shows the process of
adjusting the proportion of the main set frequency and the auxiliary set frequency to form the set
frequency.
Main reference freq.
P02.04
1
Auxiliary reference freq.
P02.07
Calculation of
reference freq. source
P02.10
2
3
4
2
2 P02.09* 2 (P02.07>3)
2 = 2 (P02.07<=3)
Proportion adjustment
(P02.11, P02.12)
Reference
frequency
Fig. 6-5 Diagram for combining the set frequency
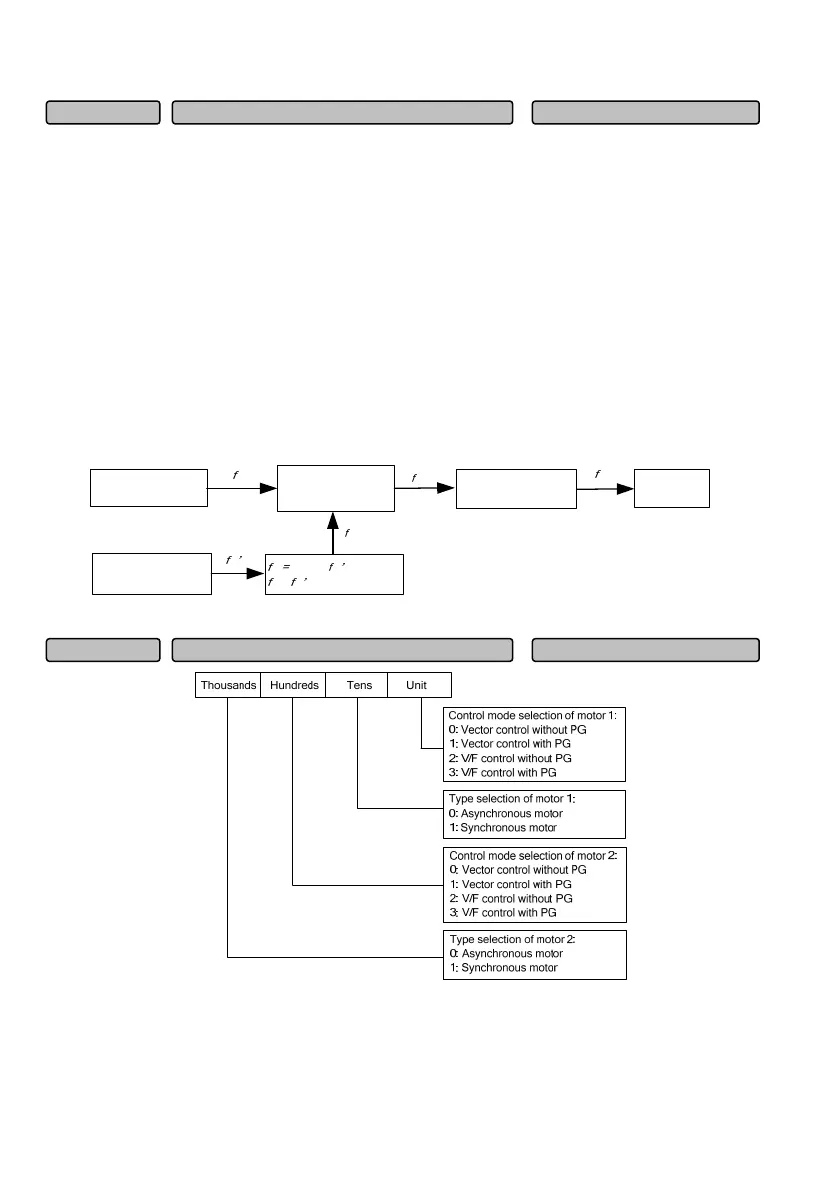
Fig. 6-6 Motor control mode diagram
Motor control mode:
0: Vector control without PG (open loop vector)
Motor and control mode selection 0000~1313H (0000)P02.00
Pulse frequency of terminal X7 0.0~100.00kHz (0.0)P01.42
 Loading...
Loading...