62
codes of Group P16). These status parameters can be viewed by pressing the key on the operation
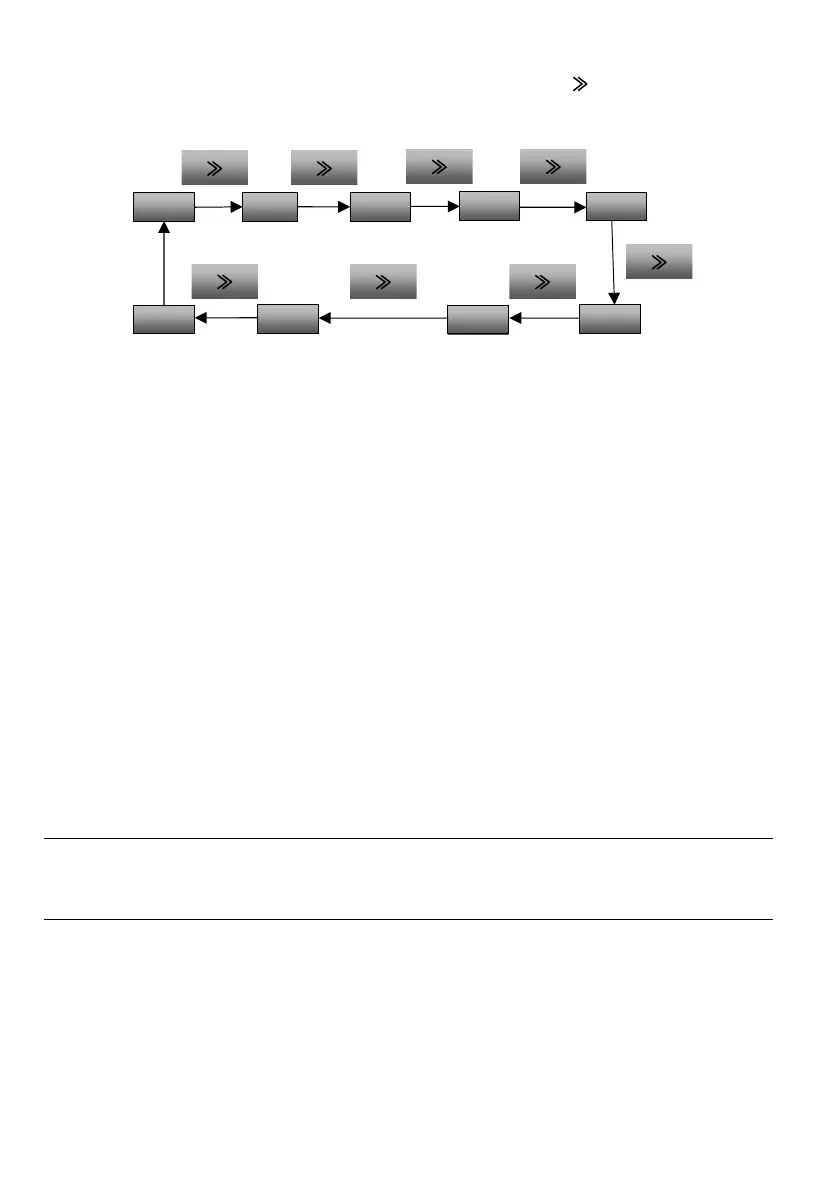
panel when they have been set. The example for the status parameter display in the drive stop status when
P16.02 is FFF is as shown in Fig.4-8.
Fig. 4-8 Operation example for switching status parameter display
4.2 Drive running mode
The terms describing the drive control, running and status will appear in the following chapters. Please read
carefully this chapter. It will help you understand and properly use the functions described in the following
chapters.
4.2.1 Drive running command channel
The drive running command channel refers to the physical channel for the drive to receive the running
command: start, stop, jog, etc. There are four types of running command channels:
1. Operation panel: To control through the RUN, STOP and M (when set as the JOG function) keys on the
operation panel.
2. Control terminal: To control through the control terminals X1, X2 (default, other digital input terminals
can be set as FWD and REV input control terminals as well), COM (two-wire system) and Xi (three-wire
system).
3. Serial port: To control the start and stop through the host device.
4. Field bus: To control the start and stop through the field bus (Profibus-DP, CanOpen, etc.).
The command channel can be selected through function code P02.02, the PANEL/REMOTE key on the
operation panel, and the multi-functional input terminals (functions No. 38, 39 and 40 are selected through
P09.00~P09.07).
Note
Before switching the channels, be sure to conduct the switching trial operation first, otherwise, equipment
damage or human injury may be caused.
4.2.2 Operating status of the drive
The operating states of the MV600 include the stop status, running status and motor parameter auto-tuning
status.
1. Stop status: If there is no running command input when the drive is started and initialized, or the stop
command is executed during the operation, the drive will enter the stop status immediately.
2. Running status: The drive will enter the running status after receiving the running command.
50.00 0.0 1500.0
0.50
540
0.00
0.0
0.00
0.00
 Loading...
Loading...