174
This parameter defines four different modes for controlling the drive running through the external
terminal.
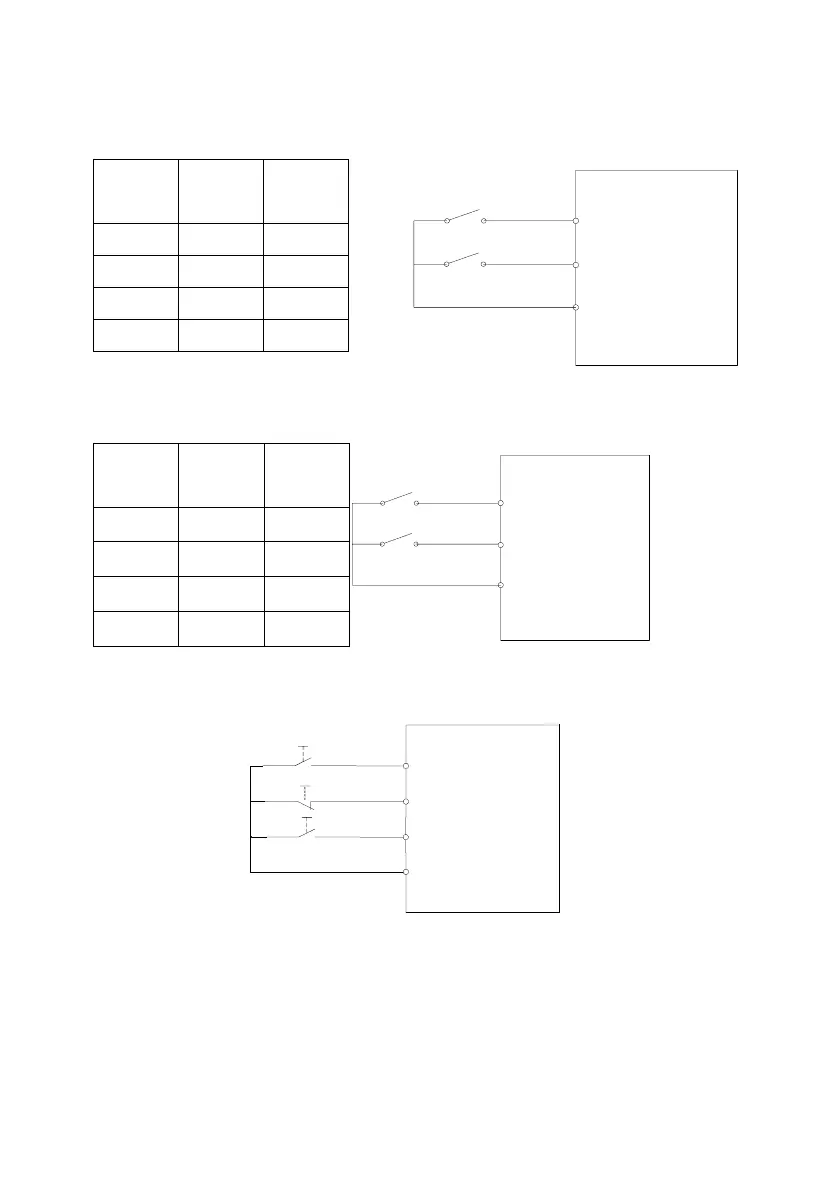
0: Two-wire running mode 1
MV600
FWD
REV
COM
K1
K2
Fig. 6-31 Two-wire running mode 1
1: Two-wire running mode 2
MV600
FWD
REV
COM
K1
K2
Fig. 6-32 Two-wire running mode 2
2: Three-wire running mode 1
MV600
FWD
REV
COM
SB2
SB3
SB1
Xi
Fig. 6-33 Three-wire running mode 1
Where:
SB1: Stop key
SB2: FWD key
SB3: REV key
Xi is the multifunctional input terminal of X1~X8. Its corresponding terminal function shall be defined as
function No. 5 “three-wire running control”.
K1 K2 Running
command
0 0 Stop
1 0 FWD
0 1 REV
1 1 Stop
K1 K2 Running
command
0 0 Stop
0 1 Stop
1 0 FWD
1 1 REV
 Loading...
Loading...