231
All the possible alarm types for MV600 are summarized as shown in table 7-2. For details, please refer to the
group P97 function code setting. If the fault disappears automatically during the running process, the drive will
also automatically reset to the status before the alarm (except AL.SC1, for details, please refer to the group
P97 function code description).
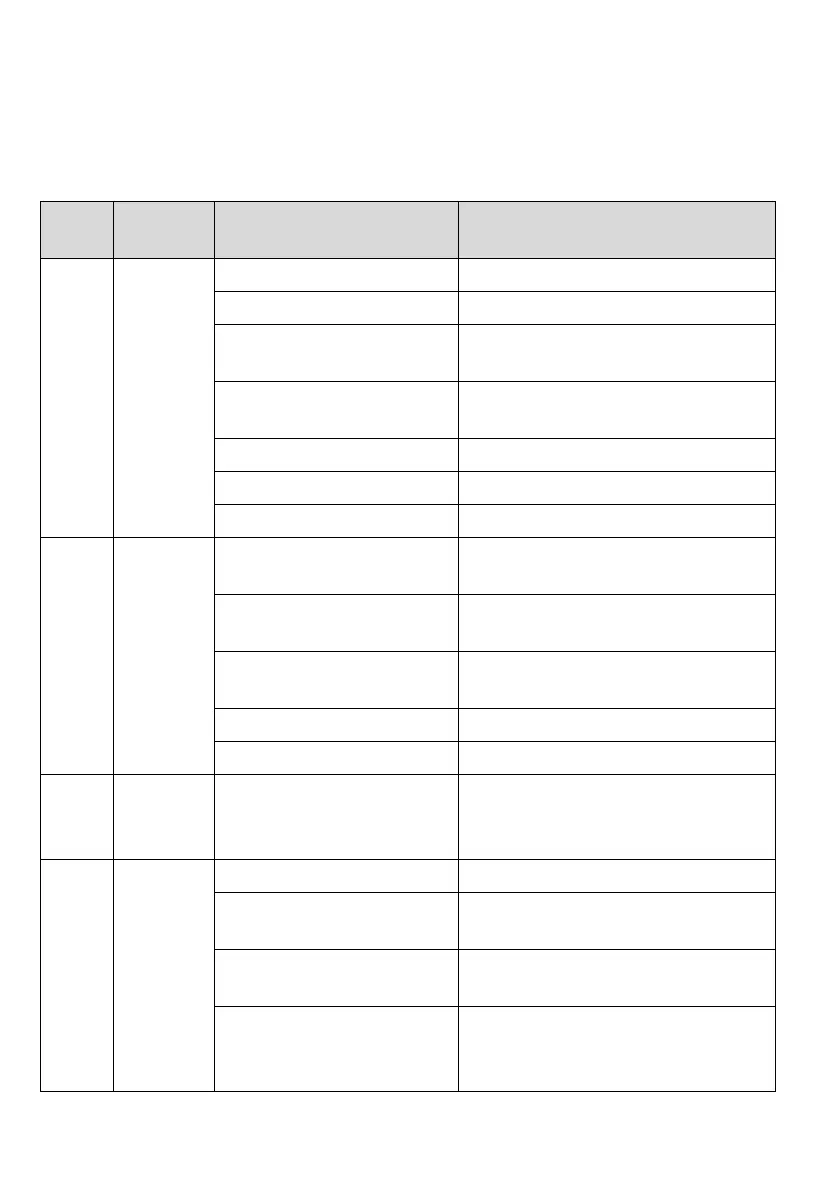
Table 7-2 Alarm code table
Alarm
code
Alarm type Possible alarm causes Solutions
AL.oL1 Drive overload
The motor parameters are incorrect. Perform the parameter auto-tuning of the motor
The load is too large. Adopt the drive with higher power
The DC braking amount is too large.
Reduce the DC braking current and lengthen the
braking time
When instantaneous stop happens,
restart the rotating motor
Set the start mode P08.00 as the speed tracking
restart function
The acceleration time is too short. Lengthen the acceleration time
The grid voltage is too low. Check the grid voltage
V/F curve is improper. Adjust V/F curve and torque increase
AL.oL2 Motor overload
The motor overload protection factor
setting is incorrect.
Set the overload protection factor of motor correctly.
The motor is blocked or the sudden
change of load is too large.
Check the load
The universal motor runs at low speed
for a long time, with heavy load.
If long-term low-speed running is required, special
motor should be used.
The grid voltage is too low. Check the grid voltage
V/F curve is improper. Set V/F curve and torque increase correctly
AL.EEP
EEPROM
read/write
fault
The read/write error of the control
parameters occurs.
Reset by pressing the STOP/RESET key, seek for
service support
AL.SC1
Abnormal
serial port
communication
The baud rate is set improperly. Set the baud rate properly.
Serial port communication error
Reset by pressing the STOP/RESET key, seek for
service support
The fault alarm parameters are set
improperly.
Modify the P15.03 and P97.00 settings
The host device does not work.
Check if the host device is working and if the wiring is
correct.
 Loading...
Loading...