64
Power on
Stop state
Speed control
mode
Jog command
input ?
P02.04 = ?
Jog
operation
Yes
No
High priority
=
0
=1 =2 =3 =4
=5
=6 =7
=8
PID
operation
Close-loop
setting valid
Multi-stage
frequency
terminal
valid
Option card
reference
Low priority
Multi-stage
frequency
operation
Common
operation,
auxiliary reference
valid
PLC
operation
Terminal
PULSE
reference
PLC
setting valid
AI reference
Serial port
reference
Digital 1:
Keyboard
reference
Digital 2:
Terminal
UP/DN
reference
Common operation,
auxiliary reference
valid
Common
operation,
auxiliary reference
valid
Common
operation,
auxiliary reference
valid
Common
operation,
auxiliary reference
valid
Common
operation, auxiliary
reference valid
∨∧
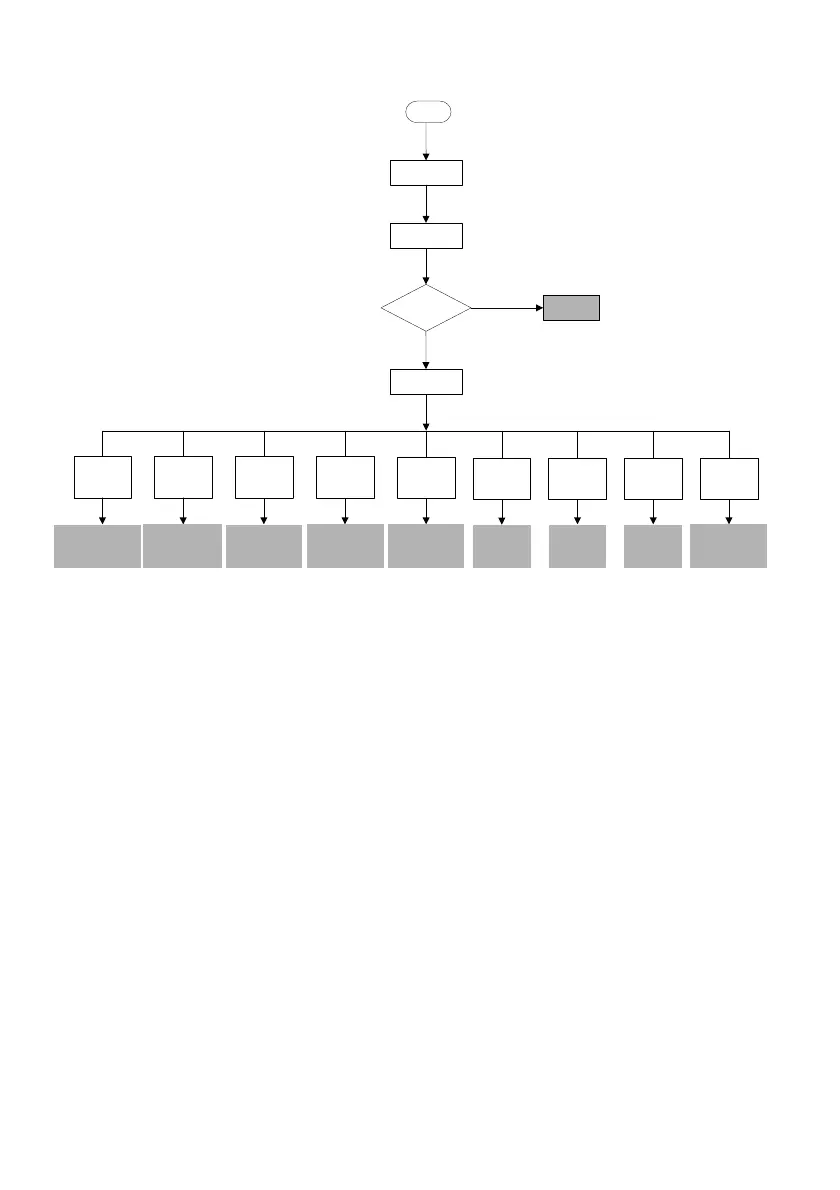
Fig. 4-9 Running mode selection under speed control mode
The five running modes provide five basic frequency sources. Except that the auxiliary frequency
superimposition, frequency adjustment can be performed for common running frequency, “jog running”, “PLC
running”, “multi-stage running" or “process closed loop running" can be served as an independent running
channel, among which, “PLC running” has various frequency source reference channel. For details, please
refer to “PLC running” frequency reference selection function code. The running modes are described below:
1) Jog running: When the drive receives the jog running command in stopping state, it will run according
to the jog frequency (refer to function codes P11.16~P11.18).
2) Process closed loop running: When the process closed loop selection function is enabled (P02.04=6),
the drive will adopt the process closed loop running mode, that is, it will conduct closed loop adjustment
according to the reference and feedback (refer to function code of Group P14). The process closed
loop running mode can be disabled via the multi-functional terminal (function no. 29). If there is a
running command at that moment, it will run at 0 Hz.
3) PLC running: When the PLC function selection is enabled (P02.04=5), the drive will select the PLC
running mode and run according to the preset running mode (refer to the description of the function
codes of P13.16~P13.46).
4) Multi-speed running: The multi-speed function selection can be enabled (P02.04=7) via the ON/OFF
combinations of the multi-functional terminals (functions 6, 7, 8 and 9), multi-stage frequency 1~15
(P11.01~P11.15) can be selected for multi-speed running.
Note: Only when 0 is selected for P11.00 the
multi-functional terminal input can be enabled, the multi-stage frequency setting is the maximum
frequency percentage, if it is negative, then the frequency will run reversely. If all the three terminals
 Loading...
Loading...