PL-565 Accumass BW500 Page 41
Recalibration
Recalibration
Belt Speed Compensation
In order to achieve optimum accuracy in the rate computation, the belt speed
displayed must equal that of the actual belt speed. As the speeds are likely to differ, a
belt speed compensation should be performed.
Run the conveyor with the belt empty.
View the belt speed.
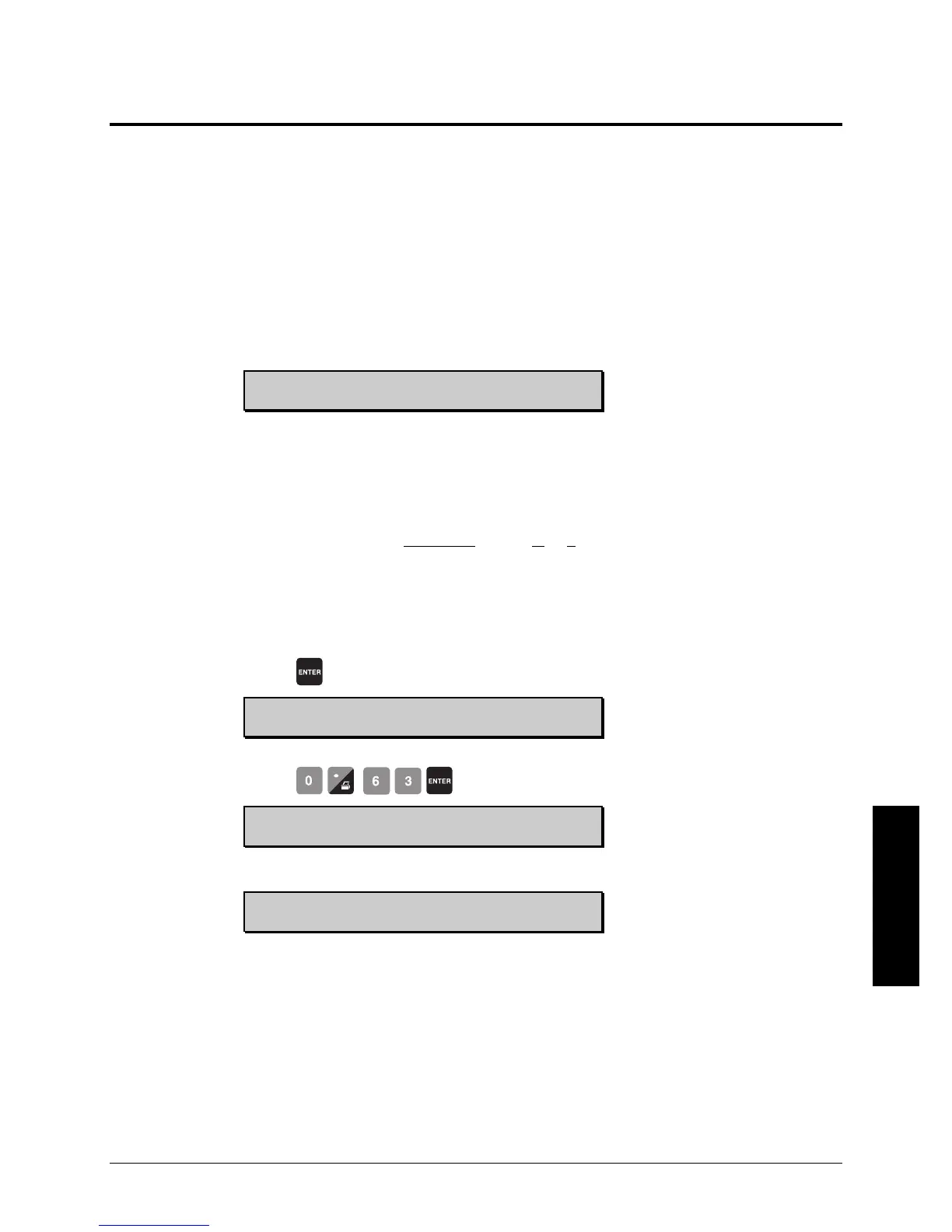
Access
P
PP
P
P
PP
P
0
00
0
0
00
0
1
11
1
1
11
1
8
88
8
8
88
8
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
A
AA
A
A
AA
A
d
dd
d
d
dd
d
j
jj
j
j
jj
j
u
uu
u
u
uu
u
s
ss
s
s
ss
s
t
tt
t
t
tt
t
V
VV
V
V
VV
V
E
EE
E
E
EE
E
n
nn
n
n
nn
n
t
tt
t
t
tt
t
e
ee
e
e
ee
e
r
rr
r
r
rr
r
N
NN
N
N
NN
N
e
ee
e
e
ee
e
w
ww
w
w
ww
w
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
0
0
.
.
6
6
0
0
Stop the conveyor and measure a length of the belt; marking the forward end (start
time) and the back end (stop time). Use the belt scale as the stationary reference.
Run the belt and measure the time for the belt length to pass over the scale.
speed = belt length m
or ft
time s min
Refer to the Start Up section on page 29 for instructions on parameter selection and
changing values.
Press
P
PP
P
P
PP
P
0
00
0
0
00
0
1
11
1
1
11
1
8
88
8
8
88
8
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
A
AA
A
A
AA
A
d
dd
d
d
dd
d
j
jj
j
j
jj
j
u
uu
u
u
uu
u
s
ss
s
s
ss
s
t
tt
t
t
tt
t
E
EE
E
E
EE
E
E
EE
E
E
EE
E
n
nn
n
n
nn
n
t
tt
t
t
tt
t
e
ee
e
e
ee
e
r
rr
r
r
rr
r
N
NN
N
N
NN
N
e
ee
e
e
ee
e
w
ww
w
w
ww
w
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
0
00
0
0
00
0
.
..
.
.
..
.
6
66
6
6
66
6
0
00
0
0
00
0
Press
P
PP
P
P
PP
P
0
00
0
0
00
0
1
11
1
1
11
1
5
55
5
5
55
5
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
C
CC
C
C
CC
C
o
oo
o
o
oo
o
n
nn
n
n
nn
n
s
ss
s
s
ss
s
t
tt
t
t
tt
t
a
aa
a
a
aa
a
n
nn
n
n
nn
n
t
tt
t
t
tt
t
V
VV
V
V
VV
V
P
PP
P
P
PP
P
u
uu
u
u
uu
u
l
ll
l
l
ll
l
s
ss
s
s
ss
s
e
ee
e
e
ee
e
s
ss
s
s
ss
s
/
//
/
/
//
/
m
mm
m
m
mm
m
9
99
9
9
99
9
7
77
7
7
77
7
.
..
.
.
..
.
5
55
5
5
55
5
1
11
1
1
11
1
6
66
6
6
66
6
9
99
9
9
99
9
If
P
PP
P
P
PP
P
0
00
0
0
00
0
1
11
1
1
11
1
4
44
4
4
44
4
D
DD
D
D
DD
D
e
ee
e
e
ee
e
s
ss
s
s
ss
s
i
ii
i
i
ii
i
g
gg
g
g
gg
g
n
nn
n
n
nn
n
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
V
VV
V
V
VV
V
E
EE
E
E
EE
E
n
nn
n
n
nn
n
t
tt
t
t
tt
t
e
ee
e
e
ee
e
r
rr
r
r
rr
r
S
SS
S
S
SS
S
p
pp
p
p
pp
p
e
ee
e
e
ee
e
e
ee
e
e
ee
e
d
dd
d
d
dd
d
0
00
0
0
00
0
.
..
.
.
..
.
6
66
6
6
66
6
3
33
3
3
33
3
m
mm
m
m
mm
m
/
//
/
/
//
/
s
ss
s
s
ss
s
The displayed speed (used in the rate computation) now equals the actual speed.
current speed of 0.6 m/s
speed sensor constant,
adjusts for P015
for constant speed (jumper),
adjusts P014
e.g. current speed of 0.6 m/s
e.g. enter correct speed of 0.63 m/s