PL-565 Accumass BW500 Page 99
PID Control
Integral Control (Automatic Reset), I
The I term on the BW500 is used to increase or reduce the amount of control output
to eliminate the offset caused by the P term. The I term acts on the accumulation of
the error over small increments of time. As the process reaches setpoint and the
error becomes small, the effect of the I term decreases. A higher I term makes the
BW500 faster to react to changes, but can also make it less stable.
• allowable input range: 0.000 to 2.000
• typical operating range: 0.100 to 0.300
• default value: 0.200
The P and I terms together can make a suitable control algorithm and for many
applications, they work fine. However, if faster response to changes is desired, it is
necessary to use larger P and I terms. Unfortunately, larger terms can make the
system unstable. A derivative term is needed to influence the control output as the
process variable approaches the set point.
Derivative Control (Pre-Act or Rate), D
The D term on the BW500 influences the control output based on changes in the
magnitude and direction of the change in error. If there is a constant error, the D
term has no effect. As the error gets larger, the D term combines with the P term to
make the BW500 control output respond faster. When the error is getting smaller,
the D term acts to reduce the amount of control output to help prevent overshooting
the set point. In general, a higher P term will require a larger D term.
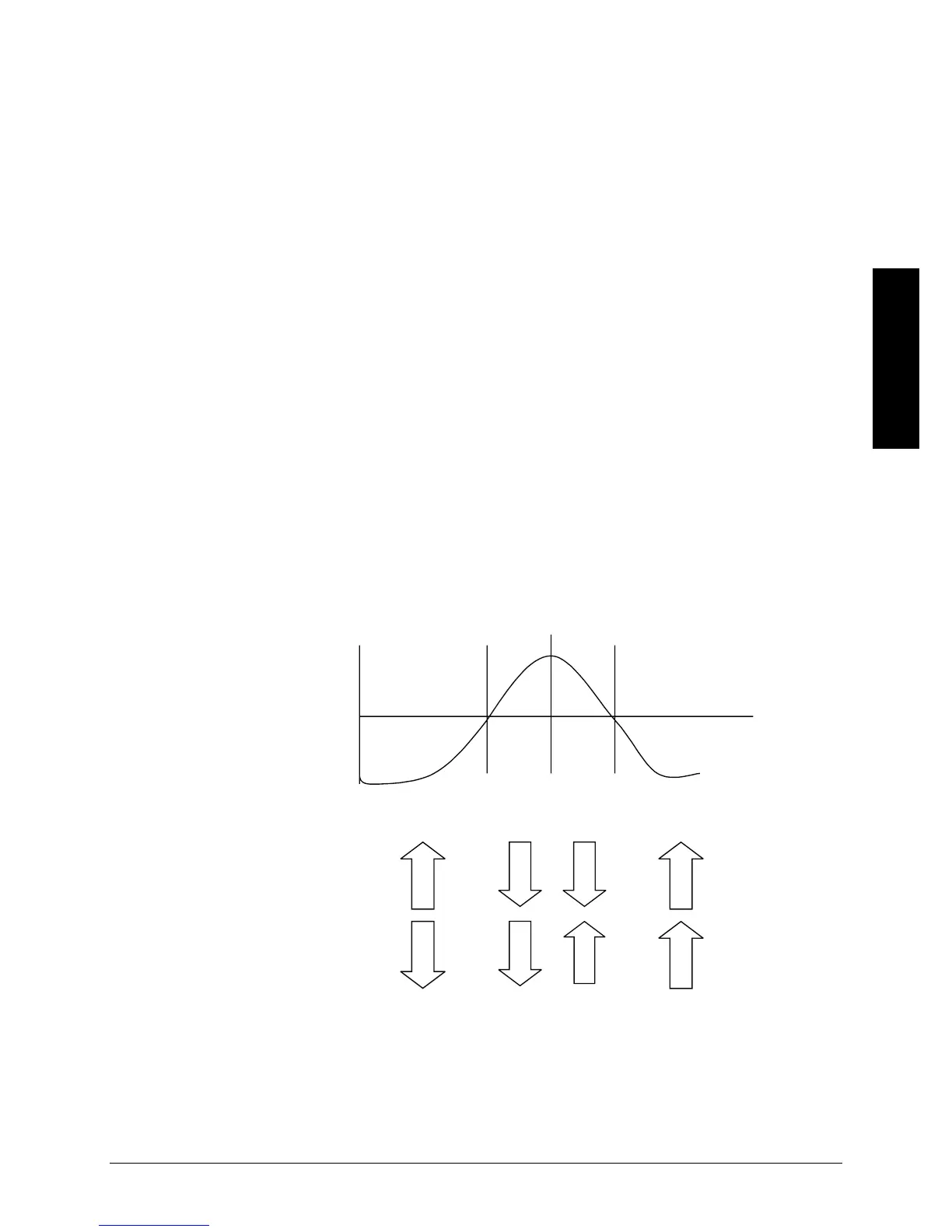
+
Error Setpoint
-
Decreasing
Error
Incr.
Error
Decr.
Error
Increasing
Error
Direction of
Proportional
Action
Direction of
Derivative
Action
• allowable input range: 0.000 to 1.000
• typical operating range: 0.010 to 0.100
• default value: 0.050
The result of the derivative action is that it can make a system more responsive and
more stable at the same time.