Page 98 Accumass BW500 PL-565
PID Control
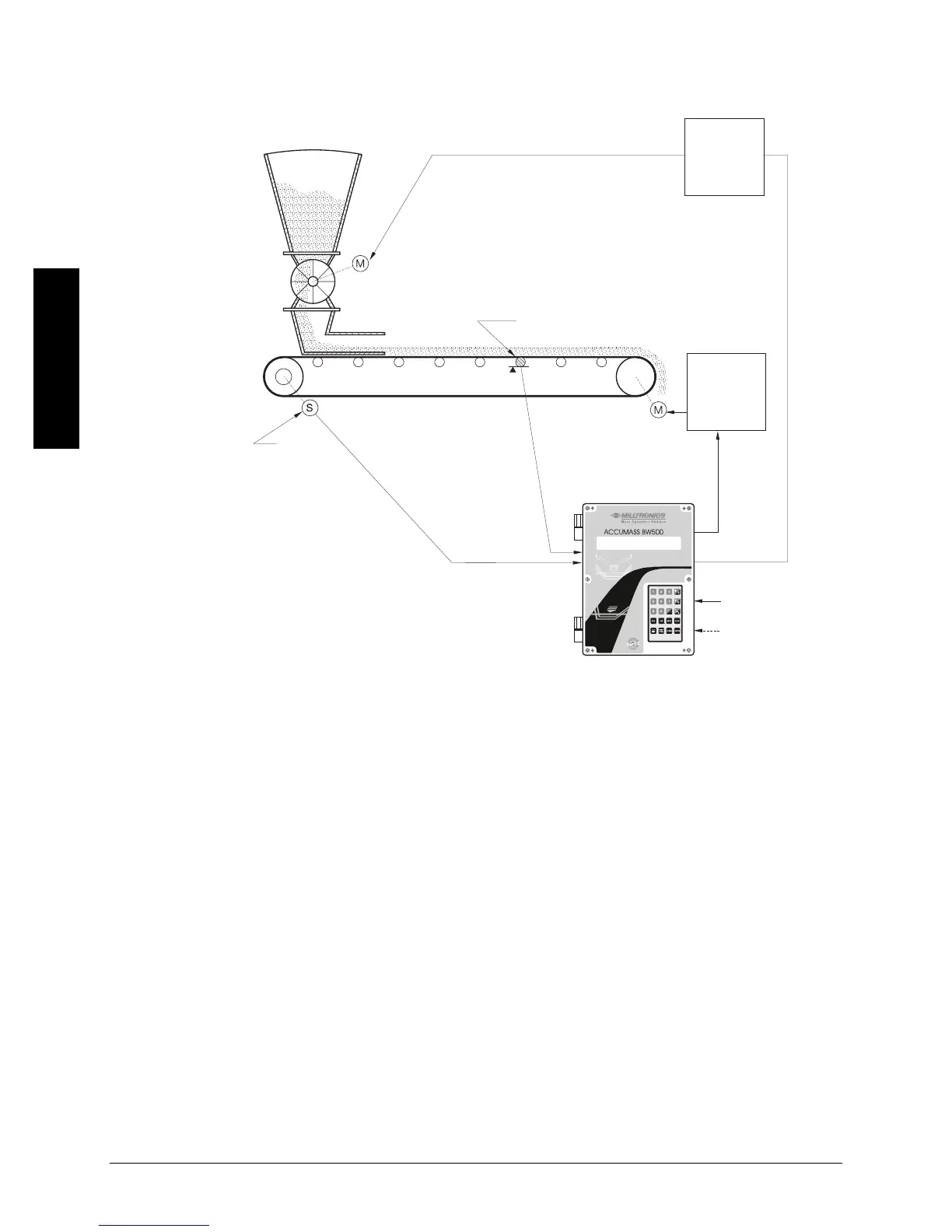
Setpoint Controller – Rate and Load Control
Setup and Tuning
Before proceeding, it would be beneficial to qualify and quantify the terms you will
encounter in the setup and tuning of the control system.
Proportional Control (Gain), P
The P term on the BW500 adjusts the control output based on the difference between
the set point and the measured flow rate. A higher P term makes the BW500 more
sensitive and faster to react to changes or disturbances. If set too high, the BW500
becomes less stable, and more susceptible to oscillations in the control output.
• allowable input range: 0.000 to 2.000
• typical operating range: 0.300 to 0.600
• default value: 0.400
The control output cannot reach the setpoint using only the P term. Since the P term
acts on the difference between the setpoint and process variable, a small
difference between these two always exist and the difference is never zero. A small
P term can get the process very close to set point, but it would take a very long time.
At the very least, an I term is required to eliminate the offset created by the P term.
belt scale
speed
sensor
speed
load
PID 1
control output,
(P201-02 = 4)
PID 1 remote setpoint -
load (P255-01 = 1)
PID 2
control output,
(P201-03 = 4)
PID 2 remote setpoint -
rate (P255-02 = 1)
PID 1 process value -load
(P402-01 = 2)
PID 1 process value -rate
(P402-02 = 1)
motor
speed
controller
rate
motor
speed
controller
load