2-8
Installation
2Unpacking to Installation
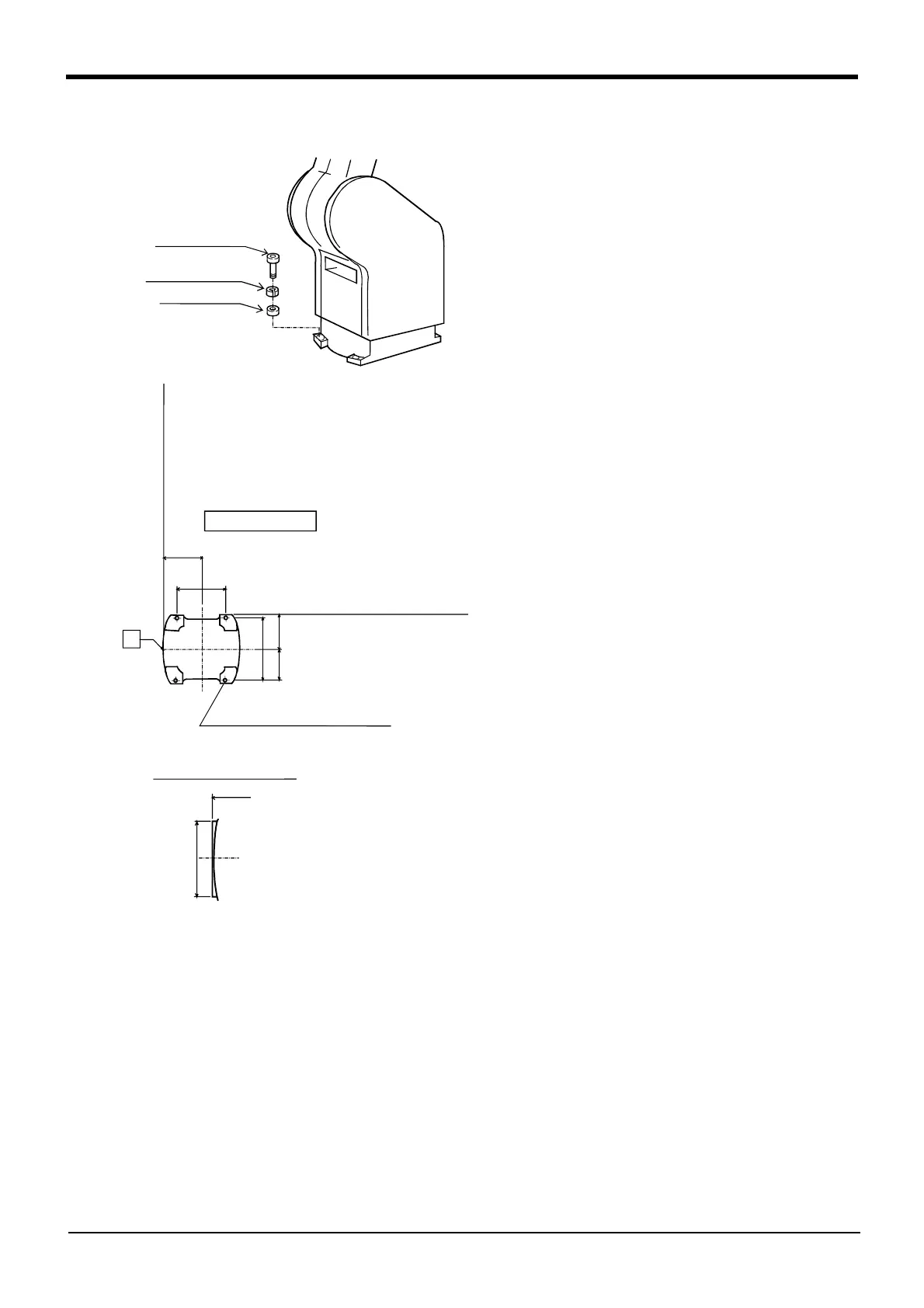
2.2.3 Installation procedures
1) The robot installation surface has been machine
finished. Use the installation holes (4-φ9 holes)
opened at the four corners of the base, and
securely fix the robot with the enclosed installa
-
tion bolts (M8 x 30 hexagon socket bolts).
2) Install the robot on a level surface.
3) It is recommended that the surface roughness of
the table onto which the robot is to be installed
by 6.3a or more. If the installation surface is
rough, the contact with the table will be poor, and
positional deviation could occur when the robot
moves.
4) When installing, use a common table to prevent
the position of the devices and jigs subject to
robot work from deviating.
5) The installation surface must have sufficient
strength to withstand the arm reaction during
operation, and resistance against deformation and
vibration caused by the static (dynamic) load of
the robot arm and peripheral devices, etc.
Fig.2-3 : Installation dimensions
Springwasher
Flatwasher
4‑M8X30
Hexagonsocket
headbolt
(4locations)
Frontofrobot
(Viewfrombottom)
4‑φ9installationholes
MagnifiedviewofC
122
160
115
122
C
6.3a(Installationstandardsid
205
102.5
50
6.3a(Installationstandardside
 Loading...
Loading...





