5-66
Resetting the origin
5Maintenance and Inspection
5.5 Resetting the origin
The origin is set so that the robot can be used with a high accuracy. After purchasing the robot, always carry out
this step before starting work. The origin must be reset if the combination of robot and controller being used is
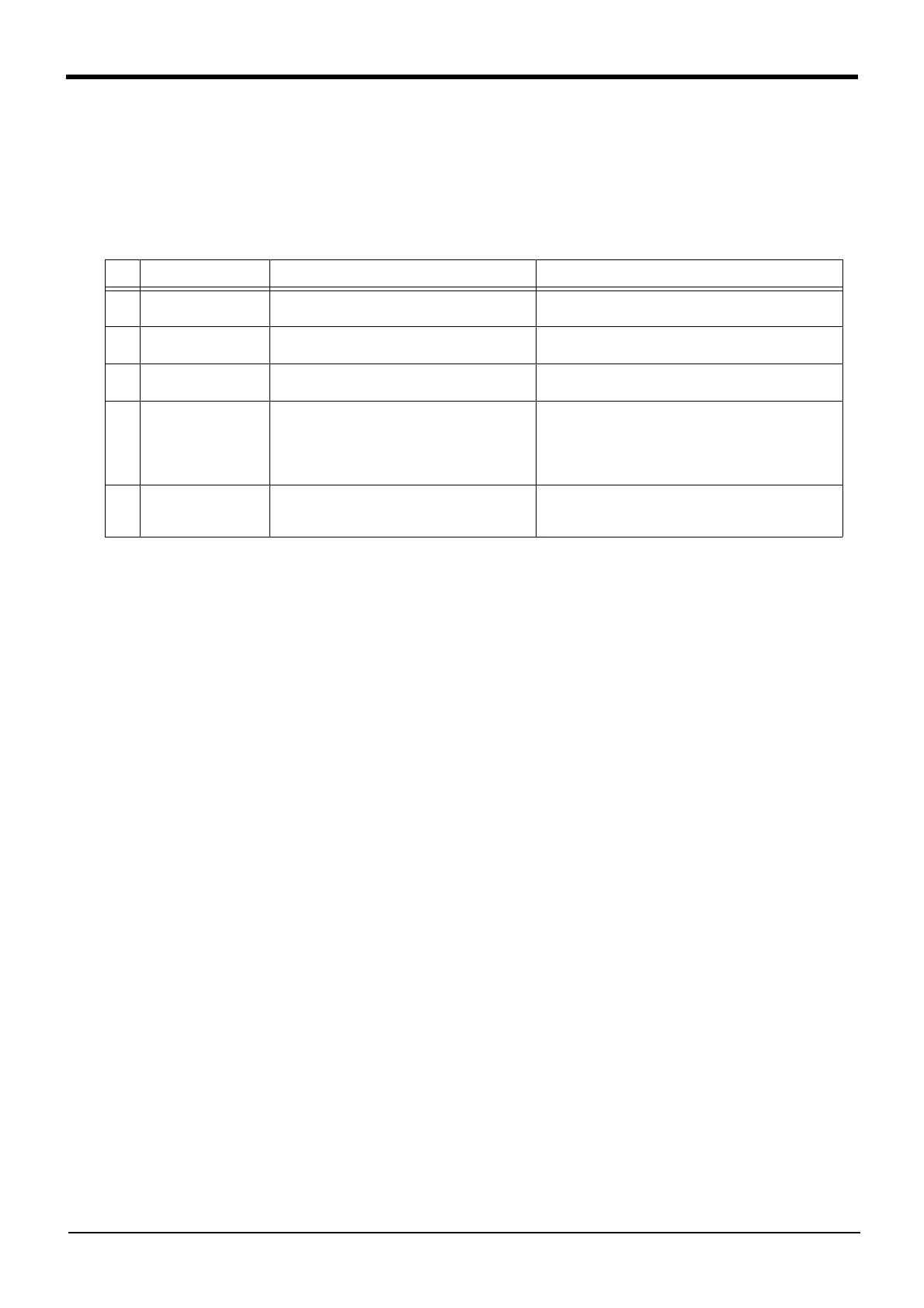
changed or if the motor is changed causing an encoder area. The types of origin setting methods are shown in
Table 5-8.
Table 5-8 : Origin setting method
No Method Explanation Remarks
1 Origin data input
method
The origin data set as the default is input from
the T/B.
The setting method is explained in "2.3Setting the
origin" on page 11 .
2 Mechanical stopper
method
This origin posture is set by contacting each axis
against the mechanical stopper.
The setting method is explained in "5.5.1Mechanical
stopper method" on page 67 .
3 Jig method The origin posture is set with the calibration jig
installed.
The setting method is explained in "5.5.2Jig method" on
page 78 .
4 User origin method A randomly designated position is set as the
origin posture.
Before using this method, the origin must be set with the
origin data input method or Mechanical stopper method
or jig method.
The setting method is explained in "5.5.3User origin
method" on page 81.
5 ABS origin method This method is used when the encoder backup
data lost in the cause such as battery cutting.
Before using this method, the origin must be set with the
other method with same encoder. The setting method is
explained in "5.5.4ABS origin method" on page 83.
 Loading...
Loading...





