2 Product Information NICE5000 User Manual
- 32 -
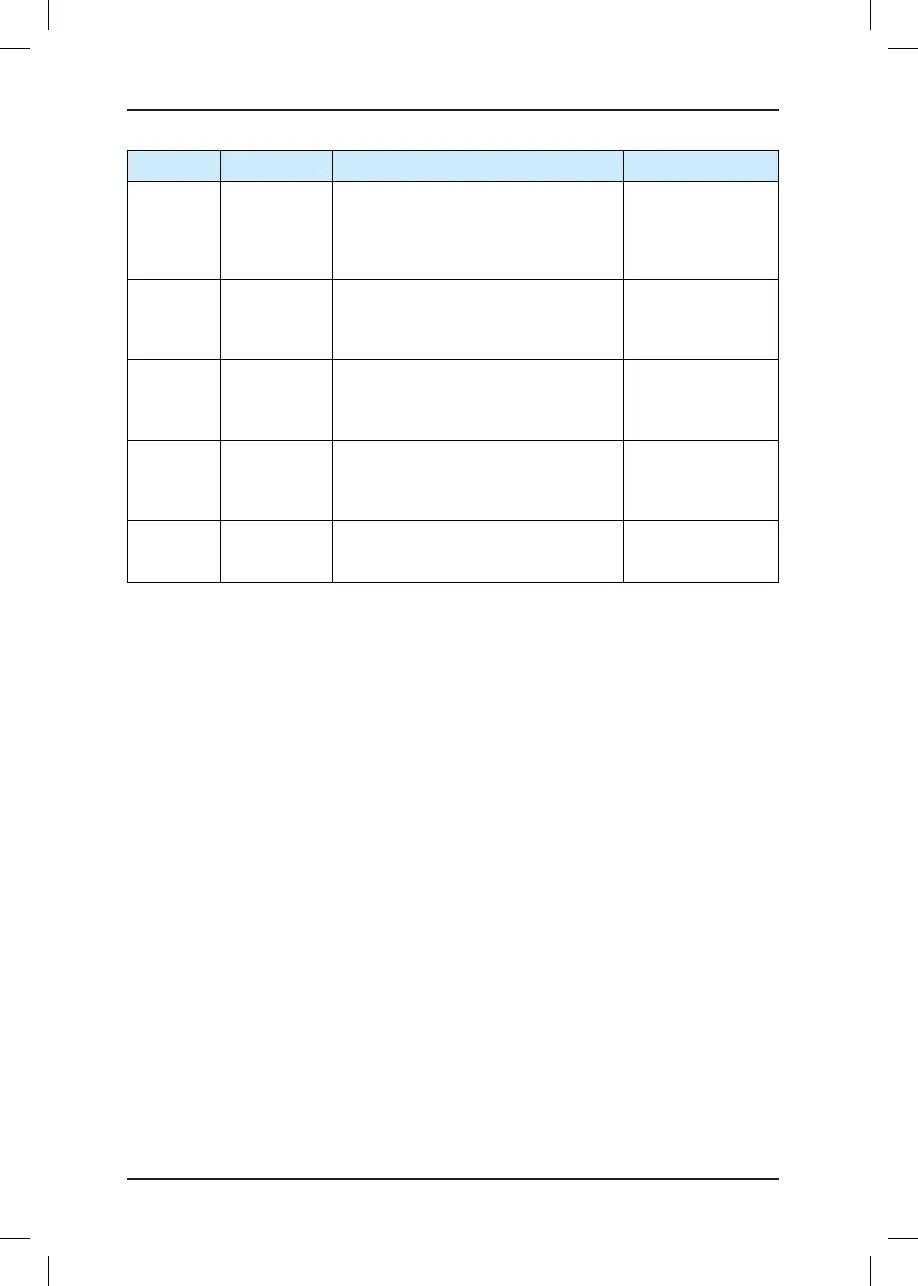
Name Model Function Remark
Car top
board
(CTB)
MCTC-CTB
The MCTC-CTB is the car control
board of the NICE5000. It has 8 DIs, 1
AI and 9 relay outputs (7 as standard
conguration). It can communicate with
the CCB and HCB simultaneously.
-
Hall call
board
(HCB)
MCTC-HCB
The HCB receives the passenger calls
and displays the oor where the elevator
is located and the running direction. It can
also be used as car display board.
A number of HCB
models are available.
For details, see
section 3.4.
Car call
board
(CCB)
MCTC-CCB
The MCTC-CCB is another interface for
passengers to interact with the control
system. It mainly collects the car alls and
outputs the call indicator state.
-
External
LED
operation
panel
MDKE
It is the external LED display and
operation panel.
It provides the
RJ45 interface for
connecting to the
controller.
Extension
cable
MDCAB
It is a standard 8-core network cable and
can be connected to MDKE.
The cable length is
3 m in the standard
conguration.
2.7 Selection of Adaptable Motor
The main counters of the electrical relationship between the controller and the motor are
voltage and current.
1. In general elevator applications, the input mains voltage is 380 V, and the motor voltage
can only be equal to or smaller than 380 V. Thus, when selecting the NICE5000, you
can take only the current of the motor into consideration.
2. When the NICE5000 is designed, large safety allowance is reserved for the main power
module. The controller can run properly within the nominal output current. During stable
running, the maximum output torque is 150% of the rated torque and can reach up to
200% of the rated torque for a short time.
Therefore, for the motor with the rated voltage of 380 V, you can select the controller of the
same power class. As long as the rated current of the motor is smaller than 1.1 times of the
controller output current, the controller of the same power class can also be used.
Generally speaking, select an adaptable motor based on the output current of the controller
and ensure that the rated current of the motor is equal to or smaller than the output current
of the controller. For technical specications of the controller, see section 2.4.