NICE5000 User Manual 5 System Commissioning and Functions
- 85 -
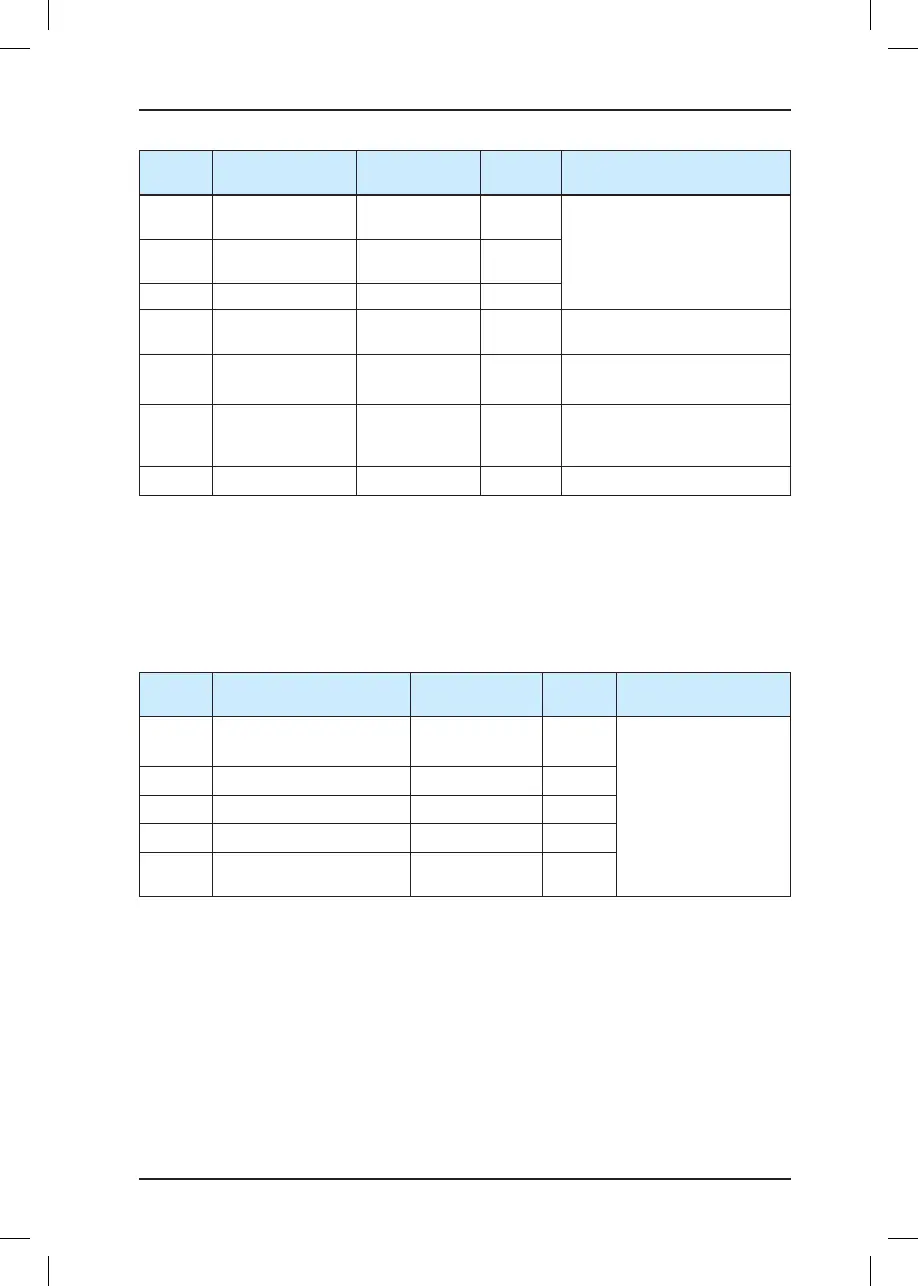
Function
Code
Parameter Name Setting Range Default Description
F2-22
Startup acceleration
time
0.000–1.500s 0.000s
It can reduce the terrace
feeling at startup caused by the
breakout friction of the guide rail.
F3-00
Startup speed 0.000–0.030 m/s 0.000 m/s
F3-01
Startup holding time 0.000–0.500s 0.000s
F3-18
Zero-speed control
time at startup
0.000–1.000s 0.200s
It species the zero speed
holding time before brake output.
F3-19
Brake release delay 0.000–2.000s
0.200s
0.600s
It species the brake release
time.
F3-20
Zero-speed control
time at end
0.000–1.000s 0.300s
It species the zero speed
holding time after the brake is
applied.
F3-21
Brake apply delay 0.200–1.500s 0.200s It species the brake apply time.
For details on these parameters, see the running time sequence in Figure 7-3.
The release time of the brakes varies according to the types and the response time of the
brakes is greatly inuenced by the ambient temperature. A very high brake coil temperature
slows the brake responsiveness. Thus, when the riding comfort at startup or stop cannot
be improved by adjusting position lock or load cell compensation parameters, appropriately
increase the values of F3-19 and F3-21 to check whether the brake release time inuences
the riding comfort.
Function
Code
Parameter Name Setting Range Default Remarks
F2-11
No-load-cell startup
0: Invalid
1: Valid
0
These are position lock
regulating parameters
when automatic pre-
torque compensation is
used (F8-01 = 1).
F2-12
Position lock speed Kp 0.00–2.00 0.50
F2-13
Position lock speed Ki 0.00–2.00 0.60
F2-14
Position lock current KP1 10–1000 60
F2-15
Position lock current loop
KI1
10–1000 30
When automatic pre-torque compensation is used (applicable to all types of encoder, but
best effect for ERN1387) the system automatically adjusts the compensated torque at
startup.
a. Set F2-11 to 1 to enable no-load-cell startup.
b. Gradually increase F2-12 (Position lock current coefcient) but ensure that the motor
does not oscillate.
c. Gradually increase F2-13 if increasing F2-12 cannot meet the torque compensation
requirement.