Specification TWINsync module
36
6 TWINsync operation modes
ID no.: CB08759-001Date: 03/2023
moog
6.2.8 Interpolating positioning “IP”
For the interpolating operation modes, the master positions that are sent are not
evaluated differentially and added to the internal position, but are instead used
directly as the setpoint. This has the advantage that no tracking errors or differences
between the master and slave can accumulate. This method has one disadvantage
when there are jumps in the master position (after errors, homing, etc.) because
these are implemented by the slave directly (possibly also when not desired). The
use of multiturn encoders and independent homing of the master and slave drives is
recommended.
6.2.8.1 PCON_IP_SLAVE, 19
Direct specification of the transferred position setpoint as an absolute position. The
appropriate corresponding master operation mode would be operation mode 7.
The same functionality can also be achieved more conveniently using operation
modes 21, 22 or 29, 30 which were developed for gantry applications.
6.2.9 MSD PLC control "PLC"
In the iPLC operation mode, data packets which are configured within the MSD PLC
are exchanged cyclically. Configuration and access are accomplished based on
MSD PLC function calls (MCB_TWIN_...). The functions are described in the MSD
PLC documentation or via the CoDeSys library manager.
Three data buffers with 24 double words each are available. Two of these are
exchanged cyclically. The third buffer can be modified and enabled as needed for
sending or receiving. A total of 2*24 double words can be exchanged cyclically.
6.2.9.1 PLC, 20
Set this operation mode for the master and the slave and write a corresponding MSD
PLC program.
6.2.10 Position setpoint (position reference value)
This operation mode is suitable for synchronizing two axes. The axes move with
positional synchronization. The homing is controlled via the master and is also
synchronized with the slave. The synchronization of the slave with the position of the
master is absolute. If the master control mode is PCON, the setpoint position is
transferred, otherwise, the actual position.
6.2.10.1 PCON_REFPOS_MASTER / PCON_REFPOS_
SLAVE, 21+22
This operation mode is selected by choosing P2580 = PCON_REFPOS_MASTER for
the master and P2580 = PCON_REFPOS_SLAVE for the slave.
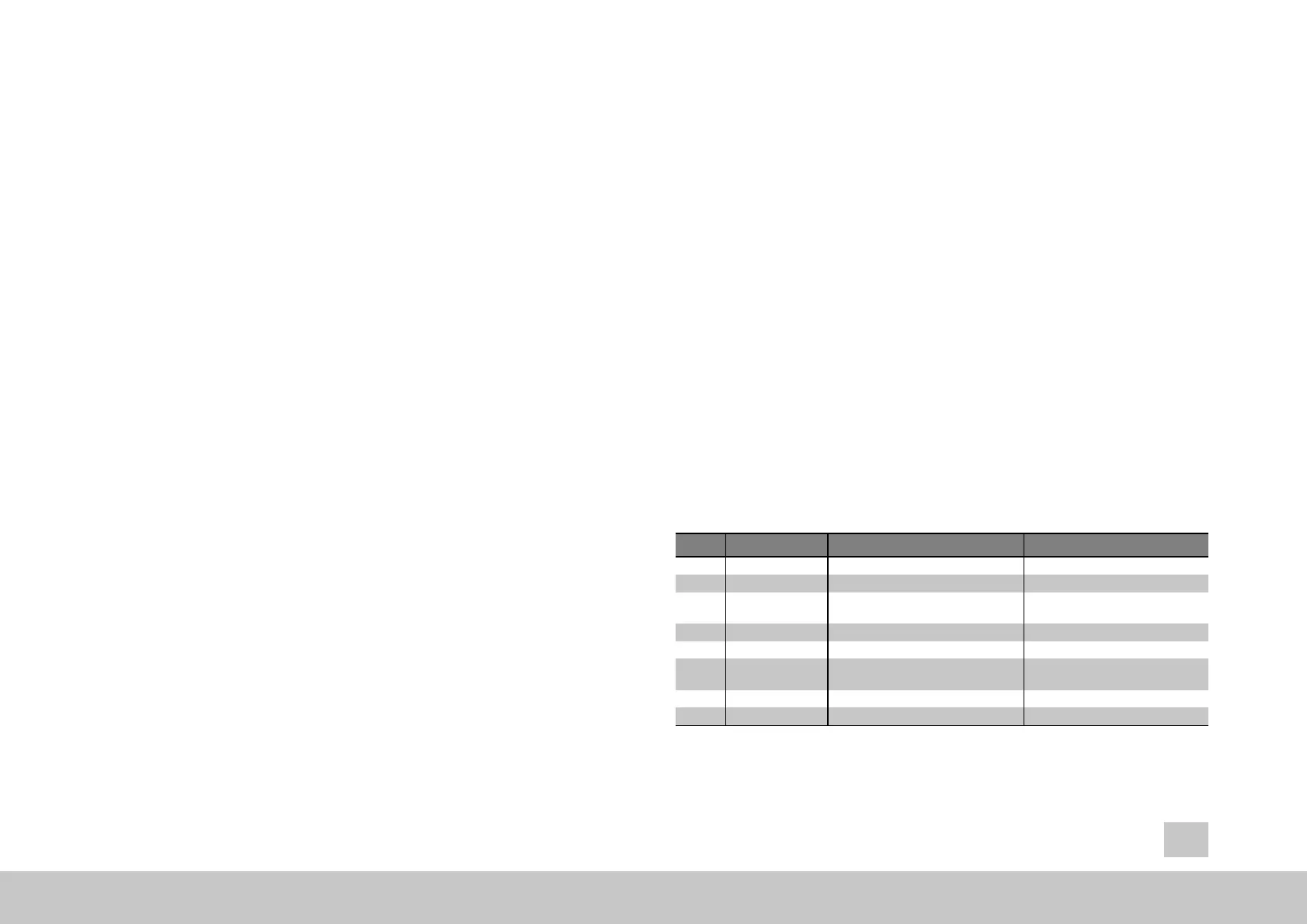
ID Parameters Setting in the master Setting in the slave
P2614 TWINdrive mode
P2580 TWIN_Setting
P0300 Control mode
SLAVE (1)
PCON_REFPOS_SLAVE(22)
PCON(3)
P0159 Control selector
P0165 Setpoint selector
P0301 Setpoint mode
MASTER (2)
PCON_REFPOS_MASTER(21)
any (actual / setpoint position is
transferred)
any
any
any
P2584 Speed-up - - -
P2602 Local scaling any (for speed)
TWINSYNC(10)
TWINSYNC(11)
IP-Mode(1) (optionally with ext. feed
forward control via TWIN)
- - -
- - -
Table 6.11: Parameters for the master and slave drives of the pre-set TWINsync
operation mode: Position setpoint (position reference value)