Specification TWINsync module
16
4 Description of parameters
ID no.: CB08759-001Date: 03/2023
moog
4.1.5 Configuration of the process data in the extended-
mapping mode
The so-called extended-mapping mode can be selected via the operation mode
selector “TWIN_Setting”.
Depending on whether the axis is a TWINmaster or a TWINslave, this operation
mode is selected by choosing P2580 = EXT_MAP_MASTER for the master and
P2580
= EXT_MAP_SLAVE for the slave.
For more on this, see the corresponding chapter on selecting the operation modes
(chapter "TWINsync operation modes" on page 19).
4.1.6 Scaling of the process data
In order to be able to transmit the three
most commonly used variables, torque,
speed and position, via the TWINsync interface simultaneously, a corresponding
scaling of the torque and speed variables from the 4-byte floating-point format used
internally to a scaled 2-byte integer format has been implemented. The references
used for scaling the “local” torque and speed values (sent data) are specified using
the parameter (P2602) MPRO_TWIN_LocalScaling. The references used for
descaling the torque and speed values received from the external drive (“remote”)
are specified using the parameter (P2609) MPRO_TWIN_RemoteScaling (see the
next table).
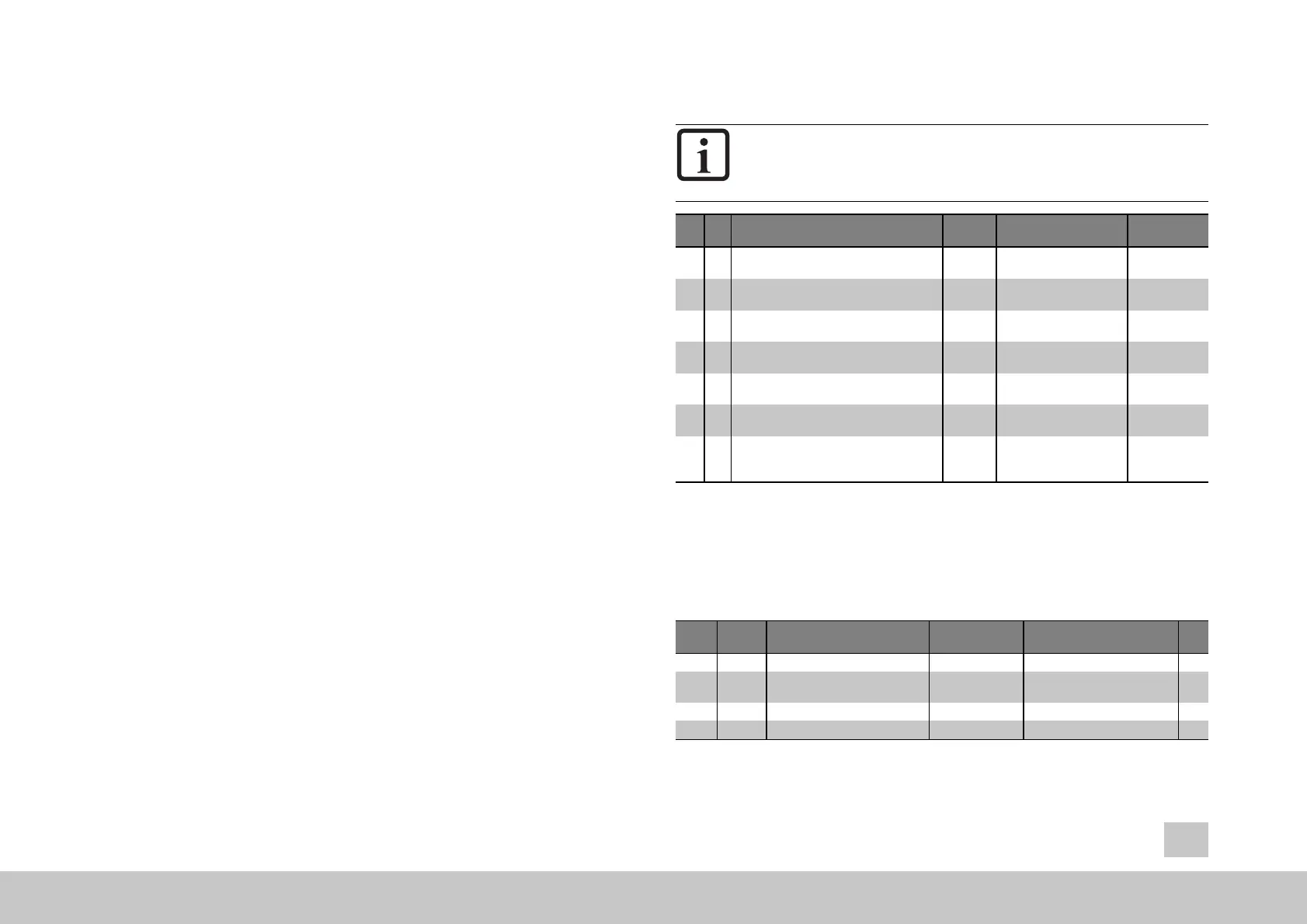
The first field entry (SubID: 0) in P2602 / P2609 contains the value of the reference
to
rque in Nm. The second field entry (SubID: 1) contains the value of the reference
speed in rpm. The third field entry (Sub-ID: 2) contains the value of the reference
current in 100 mA (see P2697[2]). The scaling represents the value range between
the negative and positive reference value over the numerical range [-32768 ...
32767]. The position data are transferred in the format specified by the units
parametrization of the device (factor group) as a 32-bit integer.
NOTE:
Generally speaking, the references P2602 / P2609 and the factor-group
settings in the master and slave drives shou
ld be identical.
ID
I
S
D
ub
Name Unit Description Data type
P
2602
0 Nm Reference torque, local
drive
Float32
1 rpm Reference speed, local
drive
Float32
P
2609
0 Nm Reference torque,
external drive
Float32
1 rpm Reference speed, external
drive
Float32
2
MPRO_TWIN_LocalScaling
MPRO_TWIN_LocalScalingTorque
MPRO_TWIN_LocalScalingSpeed
MPRO_TWIN_RemoteScaling
MPRO_TWIN_RemoteScalingTorque
MPRO_TWIN_RemoteScalingSpeed
MPRO_TWIN_RemoteScaleCurrent 100 mA Reference current,
external drive (see P2697
[2])
Float32
Table 4.7: References for scaling the local
and the
external torque and speed
signals
The following table shows the parameters typically used for the process data which
are to be sent. The parameters
P2596 - P2601 describe the “local” setpoint and
actual values for torque, speed and position.
ID Sub ID Name Unit Description
Data
type
P 2596 0 scaled Int16
P 2597 0
MPRO_TWIN_LocalRefTorque
MPRO_TWIN_LocalActTorque scaled Int16
P 2598 0 scaled Int16
P 2599 0
MPRO_TWIN_LocalRefSpeed
MPRO_TWIN_LocalActSpeed scaled
scaled torque setpoint (local)
scaled torque actual value
(local)
scaled speed setpoint (local)
scaled speed actual value Int16
Table 4.8: Frequently used parameters for transmitting process data