Specification TWINsync module
34
6 TWINsync operation modes
ID no.: CB08759-001Date: 03/2023
moog
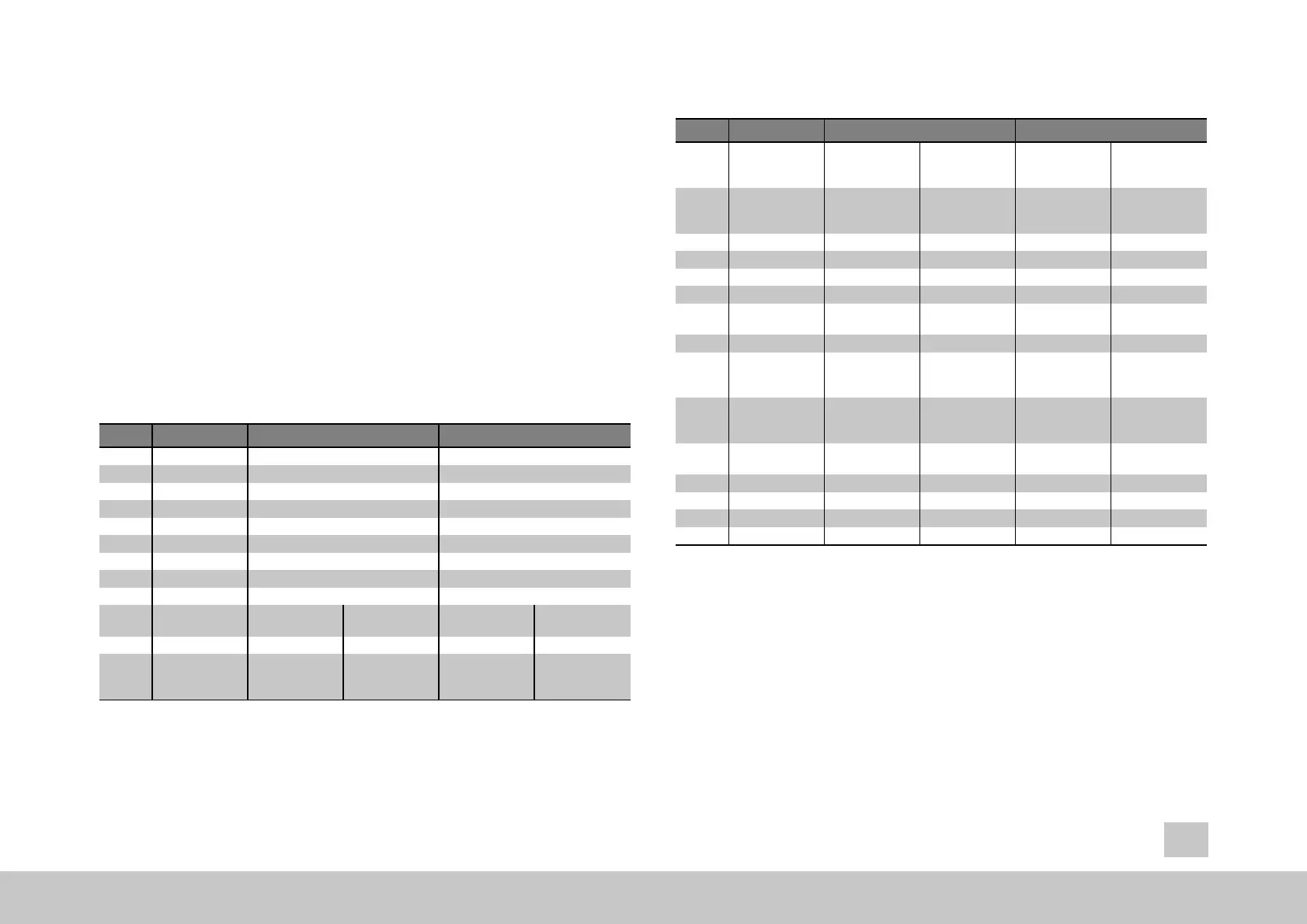
6.2.6 Virtual encoder “VE” (torque)
6.2.6.1 VE_TCON_MASTER / VE_TCON_SLAVE, 12+13
This operation mode is selected by choosing P2580 = VE_TCON_MASTER for the
master and P2580 = VE_TCON_SLAVE for the slave. The master sends its torque
setpoint, the current speed and the current position angle to the slave. To do so, the
torque and speed values are first converted to a value between "-1" and "1" thro
ugh
“LocalScaling” and are then sent to the slave. Once they have arrived there, the
values are converted back to the original variables through “RemoteScaling”.
The slave sends its error number and its error location to the master.
Mapping of the sent and received data takes place automatically by setting P2580.
The tables must not be modified manually!
ID Parameters Setting in the master Setting in the slave
P2614 TWINdrive mode
P2580 TWIN_Setting
P0300 Control mode
P0159 Control selector
P0165 Setpoint selector
P0301 Setpoint mode
P2581 MasterTorqueTF
P2602 Local scaling
P2609 Remote scaling
MASTER (2)
VE_TCON_MASTER(12)
any
any
any
any
- - -
maximum torque and maximum speed
- - -
SLAVE (1)
VE_TCON_SLAVE(13)
TCON(1)
TWINSYNC(10)
TWINSYNC(11)
IP-Mode(1)
any
- - -
same as P2602 from master
P2615 Mapping of the
sent data
Parameter value
(hex)
Meaning Parameter value
(hex)
Meaning
Sub-ID 0 0000.0003 3 objects 0000.0002 2 objects
Sub-ID 1 0A24.0010 local torque
setpoint P2596
(16-bit)
0A5A.0010 current error
number P2650[0]
(16-bit)
Table 6.10: Parameters for the master and slave drives of the pre-set TWINsync
operation mode: "Virtual Encoder VE" (torque)
ID Parameters Setting in the master Setting in the slave
Sub-ID 2 0A27.0010 local speed actual
value P2599 (16-
bit)
0A5A.0110 current error
location P2650[1]
(16-bit)
Sub-ID 3 107C.0010 local position
actual value P4220
(16-bit)
Sub-ID 4
Sub-ID 5
Sub-ID 6
Sub-ID 7
P2616 Mapping of the
received data
Parameter value
(hex)
Meaning Parameter value
(hex)
Meaning
Sub-ID 0 0000.0002 2 objects 0000.0003 3 objects
Sub-ID 1 0A5A.0010 current error
number P2650[0]
(16-bit)
0A2B.0010 RemoteRefTorque
P2603 (16-bit)
Sub-ID 2 0A5A.0110 current error
location P2650[1]
(16-bit)
0A2E.0010 RemoteActSpeed
P2606 (16-bit)
Sub-ID 3 107D.0010 RemoteActEps
P4221 (16-bit)
Sub-ID 4
Sub-ID 5
Sub-ID 6
Sub-ID 7
Table 6.10: Parameters for the master and slave drives of the pre-set TWINsync
operation mode: "Virtual Encoder VE" (torque) (continued)
The following figure shows the process data interface between the master and slave
drives in the operation mode: "Virtual Encoder VE" (torque)