Moon Control Products Ltd. Tel.: +44 (0)1202 599922 www.mooncontrolproducts.com Page | 31
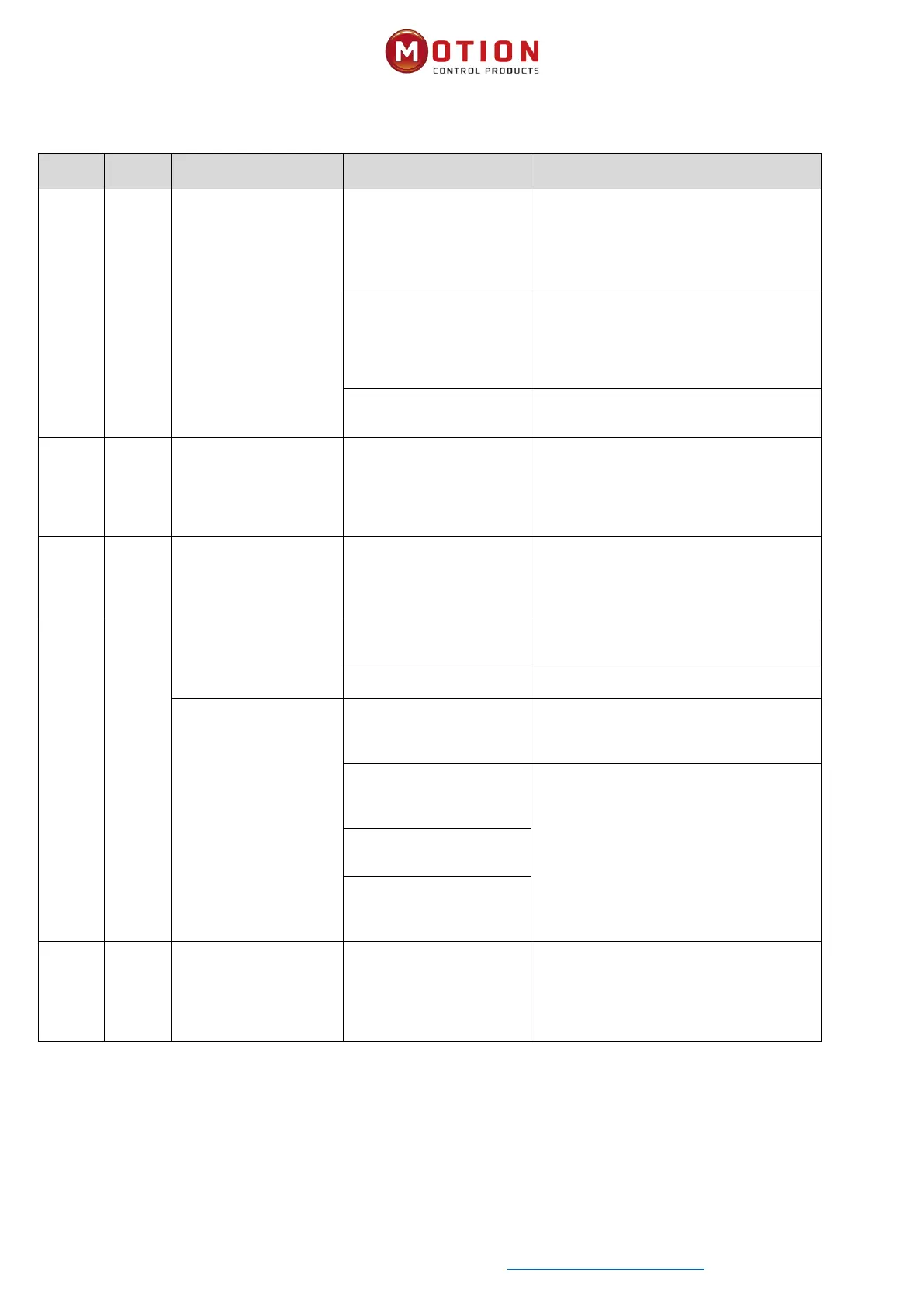
Table 5–1 Alarm codes of Error_State 1 (connued…)
The brake is not released
when the motor sha is
rotang (only for brake
motor)
1. Check if brake cable wiring is correct
2. Check brake power can meet with the
requirements (output voltage is DC24V,
input current is 1A, output power is bigger
than 24W)
Machine equipment stuck
or excessive fricon
1. Cancel motor enable, or power o driver
2. Please drag load to make it move back and
forth in motor's running route. Ensure
that there is no machine equipment stuck
or excessive fricon Add lubricate
Motor UVW phase
sequence is incorrect
Exchange motor wiring of phase U and phase
V
The input pulse frequency
is too high
External input pulse
frequency is too high
1. Reduce external pulse input frequency
2. When ensure safely use motor, increase
"Frequency_Check" (Open“Driver”->
“Control modes”->“Pulse mode”->
“Frequency_Check”), max 600
The motor temperature is
too high
The motor temperature
exceeds the specied value
1. Reduce ambient temperature of the motor
and improve cooling condions
2. Reduce acceleraon and deceleraon
3. Reduce load
Motor excitaon error (for
incremental encoder
motors)
Motor UVWphase sequence
is wrong
Exchange motor wiring of phase U and phase V
Encoder informaon error
(for magnetoelectric
encoder motors)
Communicaon is incorrect
when the encoder is
inialized
Check encoder wiring, restart driver
The encoder type is wrong,
e.g., an unknown encoder is
connected
The data stored in the
encoder is wrong
The controller cannot
support the current encoder
type
Data is damaged when the
power is turned on and
data is read from the
EEPROM
1. Open soware “Driver”->“Init Save Reboot”
2. Click “Init Control Parameters”-> “Save
Control Parameters”-> “Save
3. Motor Parameters”->“Reboot” Import cdi le
by soware
 Loading...
Loading...