Troubleshooting
21 AP-74700 – Rev. 1.0 – 10/03/2008
2.4 CARRIAGE RELATED ERRORS
2.4.1 E066 - CR Motor Err
2.4.2 E068 - CR Encoder Err
2.4.3 E072
- CR OverCurrent
The mainboard is not receiving an encoder-signal, from the CR encoder sensor. Even though, the
mainboard sends a signal to the CR-motor to move the carriage.
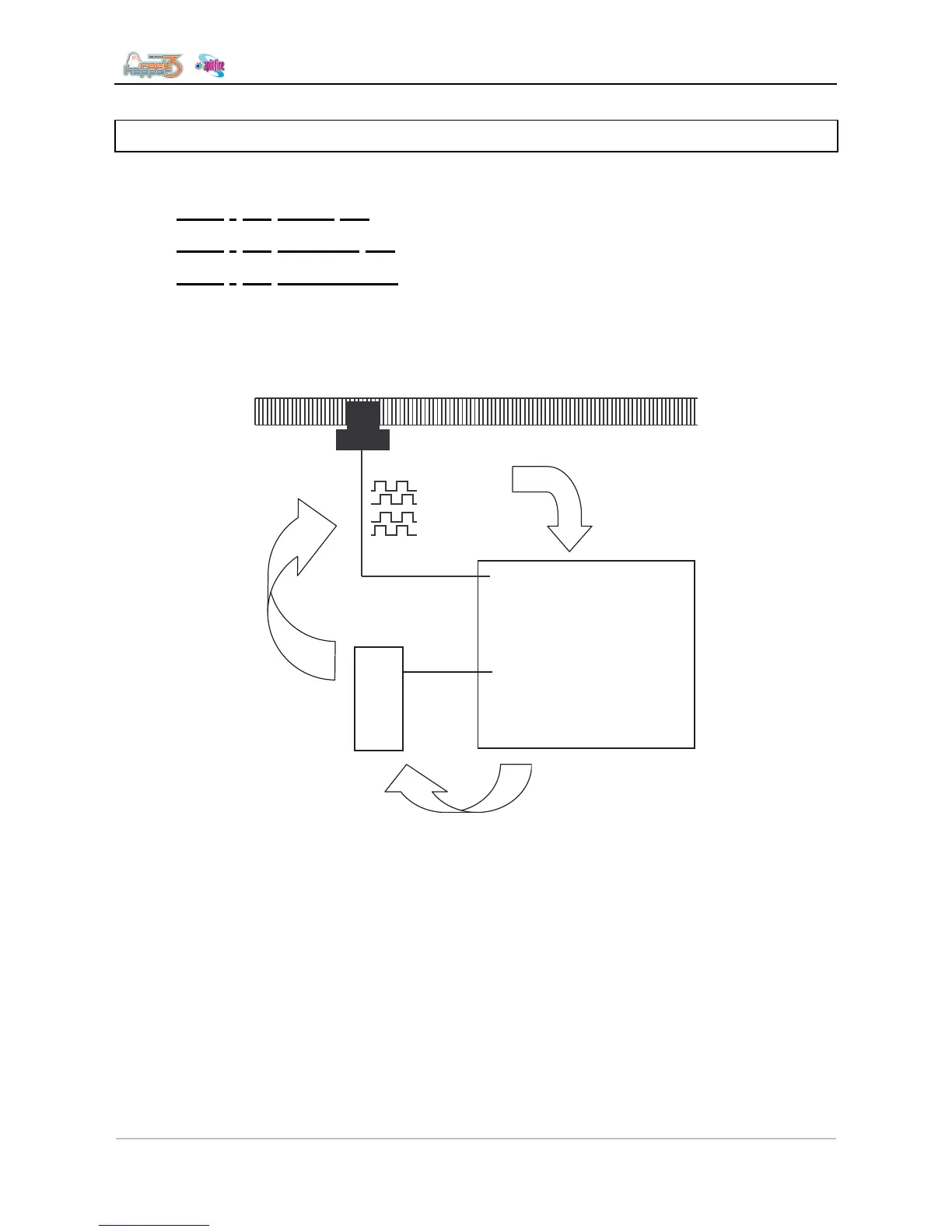
Basic principles of the CR-Driving and Encoder-system:
Mainboard
Y-motor
Y-Encoder
CW-Movement
= Carriage moves left
CCW-Movement
= Carriage moves right
1
2
3
Step 1 : Power supply to motor
Step 2 : Mechanical movement moves Y encoder
Step 3 : Y encoder gives feedback to the mainboard
The electronics wants to move the carriage. The driver IC on the mainboard provides power to the Y-motor
(1). Therefore the Y-motor starts to turn, resulting in carriage-movement (2). Carriage movement is
detected via the encoder-sensor (3), back to the electronics.
This closed-loop system is fully controlled in the electronic circuit of the mainboard. It regulates the direction,
electrical current and the speed of the carriage extremely precisely.