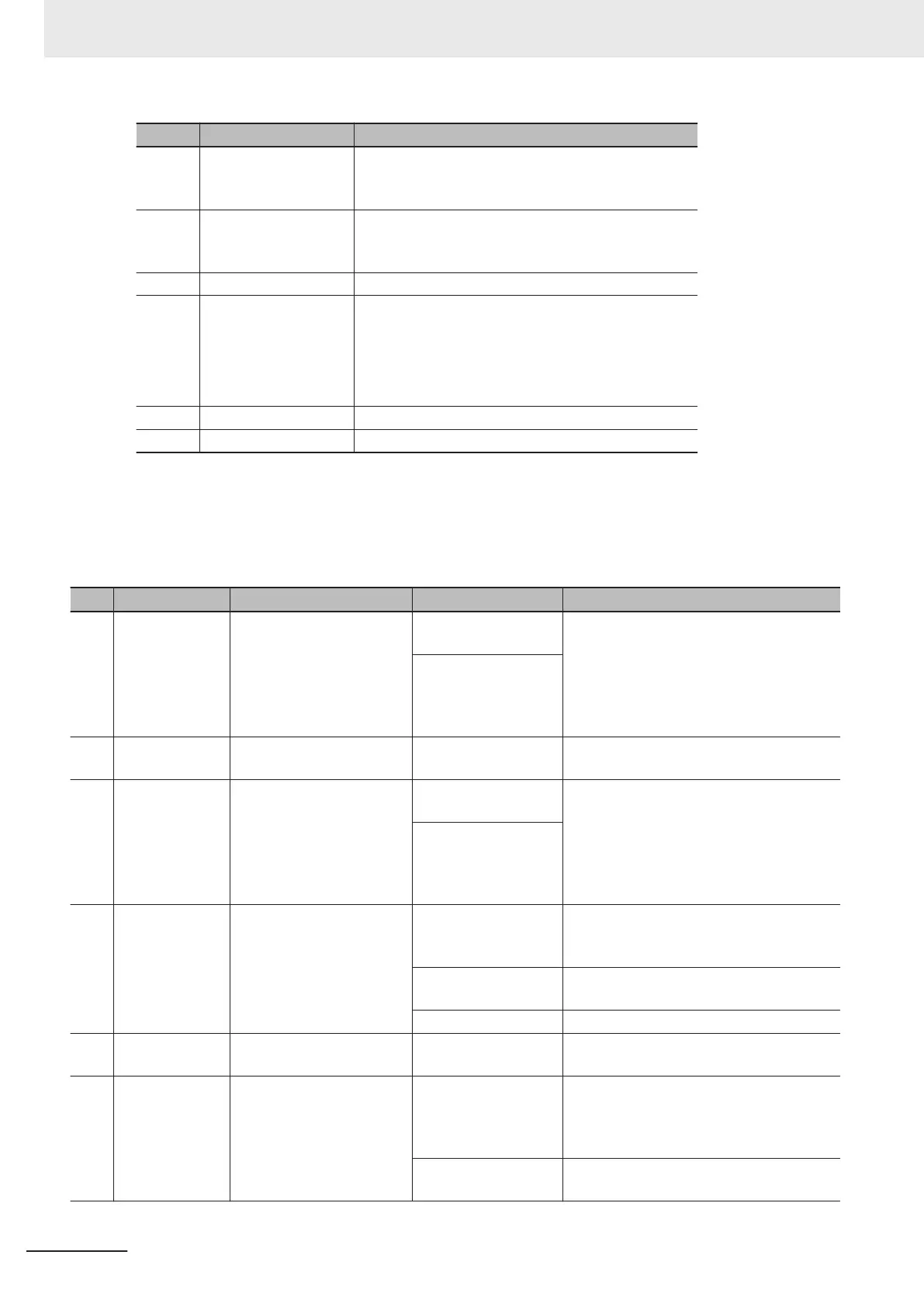
Bit Name Function
31 Timeout error Shows the status of the timeout error.
0: No error
1: Timeout error
30
CRC error Shows the status of the CRC error.
0: No error
1: CRC error
29 to 24 Reserve
23 to 8 Additional data Data to be displayed varies with the Command Code.
• For Command Code = $00D8
Shows the error code.
*1
• For Command Code = $0000, $0040, or $0044
Shows the status.
*2
7 Reserve
0 to 6 Multi-turn position data Upper 7 bits of multi-turn position data
*1. Check the error code and take appropriate measures.
For solutions, refer to Solutions to Error Codes on page A-30 below
.
After you implement measures, cycle the power supply or clear status.
*2. Status represents the information that summarizes error codes. For details, refer to Status on page A-31.
Solutions to Error Codes
Bit Name Function Cause Corrective action
15 Counter code
error
The encoder detected a
one-rotation counter error
.
Excess noise has oc-
curred.
Implement noise countermeasures.
If the error occurs even after the noise
countermeasures are implemented, re-
place the motor because the Servomotor
failed.
Failure due to vibra-
tion, shock, conden-
sation, foreign materi-
al, etc.
1
1 to
14
Reserve
10 Counter incre-
ment error
The encoder detected a
one-rotation counter error
.
Excess noise has oc-
curred.
Implement noise countermeasures.
If the error occurs even after the noise
countermeasures are implemented, re-
place the motor because the Servomotor
failed.
Failure due to vibra-
tion, shock, conden-
sation, foreign materi-
al, etc.
9
Motor overheat
error
The encoder detected the
temperature that exceeded
the protection level of mo-
tor.
The temperature is
high around the mo-
tor.
Adjust the temperature around the motor
to within the operating temperature range.
The motor is over-
loaded
Adjust the motor load rate to within the
specified range.
Encoder failure
If the error persists, replace the motor.
7 to
8
Maintenance in-
formation
This is not used.
6 Absolute posi-
tion detection
error
The encoder detected a
multi-rotation counter error
.
An error was detected
in the multi-rotation
detecting area of the
encoder
After cycling the power supply
, clear multi-
turn.
Excess noise has oc-
curred.
Implement noise countermeasures.
If the error persists, replace the motor.
Appendices
A-30
CK3M-series Programmable Multi-Axis Controller User's Manual Hardware (O036)
 Loading...
Loading...








