NOTE:
Zero value set on this page is not stored permanently and are restored to the
default values on power reset.
The Proximity oset can be used to calibrate the proximity reading. The calibration requires
the following steps to be done:
•
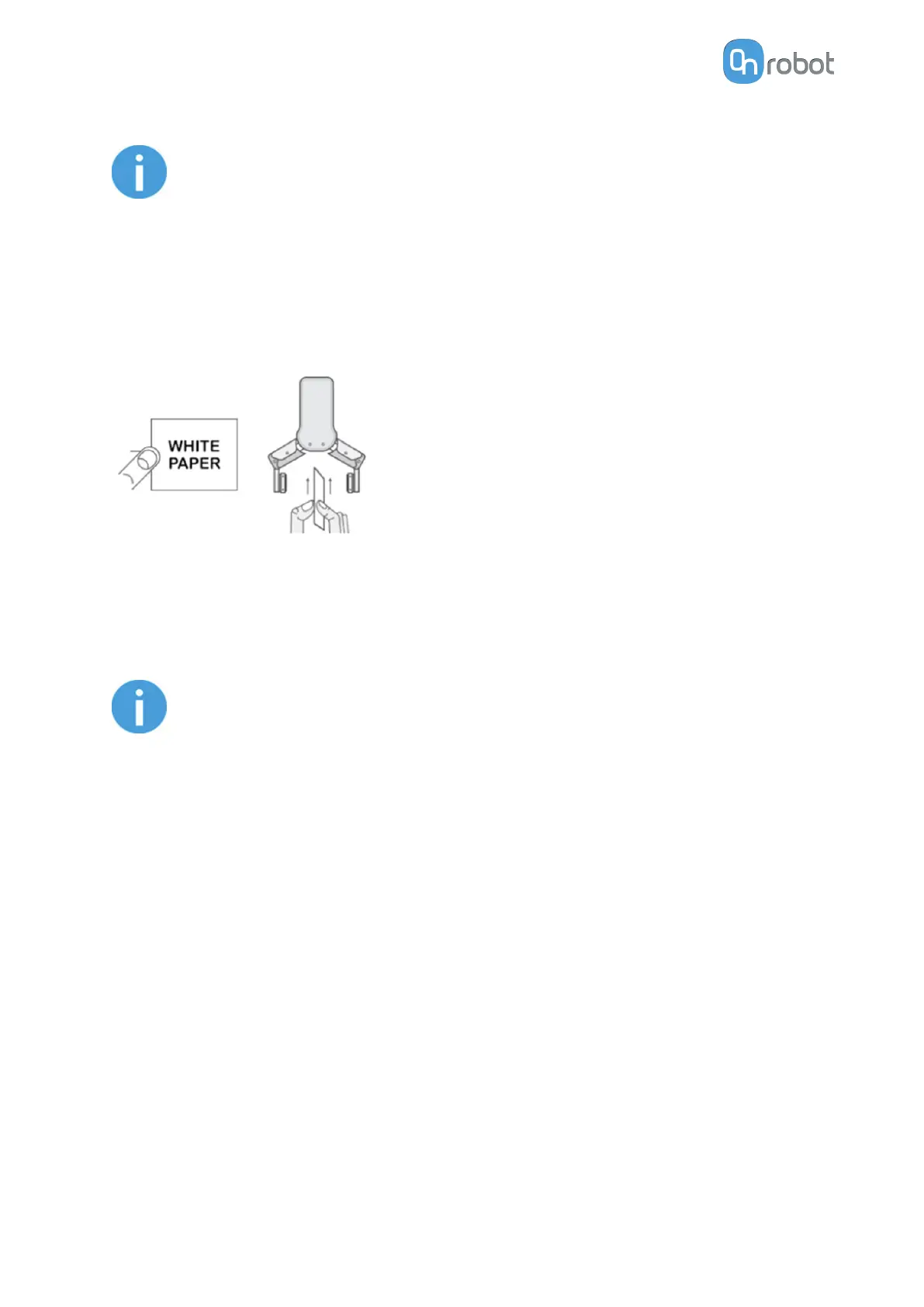
Write 0 mm to the Left and Right edit box and click on the Save button.
•
Close the gripper fully (set the Width to 0) while you hold a white paper between the
fingertips.
•
Read the actual Left and Right Proximity values (e.g.: 19mm and 25mm)
•
Write these values to the Left and Right edit boxes and click on the Save button to store it
permanently.
•
Open the gripper and the calibration is
finished.
NOTE:
Setting the osets too high may clip the proximity reading at 0 mm (negative
distance is not shown). In case of clipping (reading 0 mm), try to decrease the
oset values.
The gripper can be controlled by adjusting the Force and Width value. First set the required
gripping force and then adjust the width slider that will immediately control the gripper.
ADDITIONAL SOFTWARE OPTIONS
151