6.1.1. 3FG15
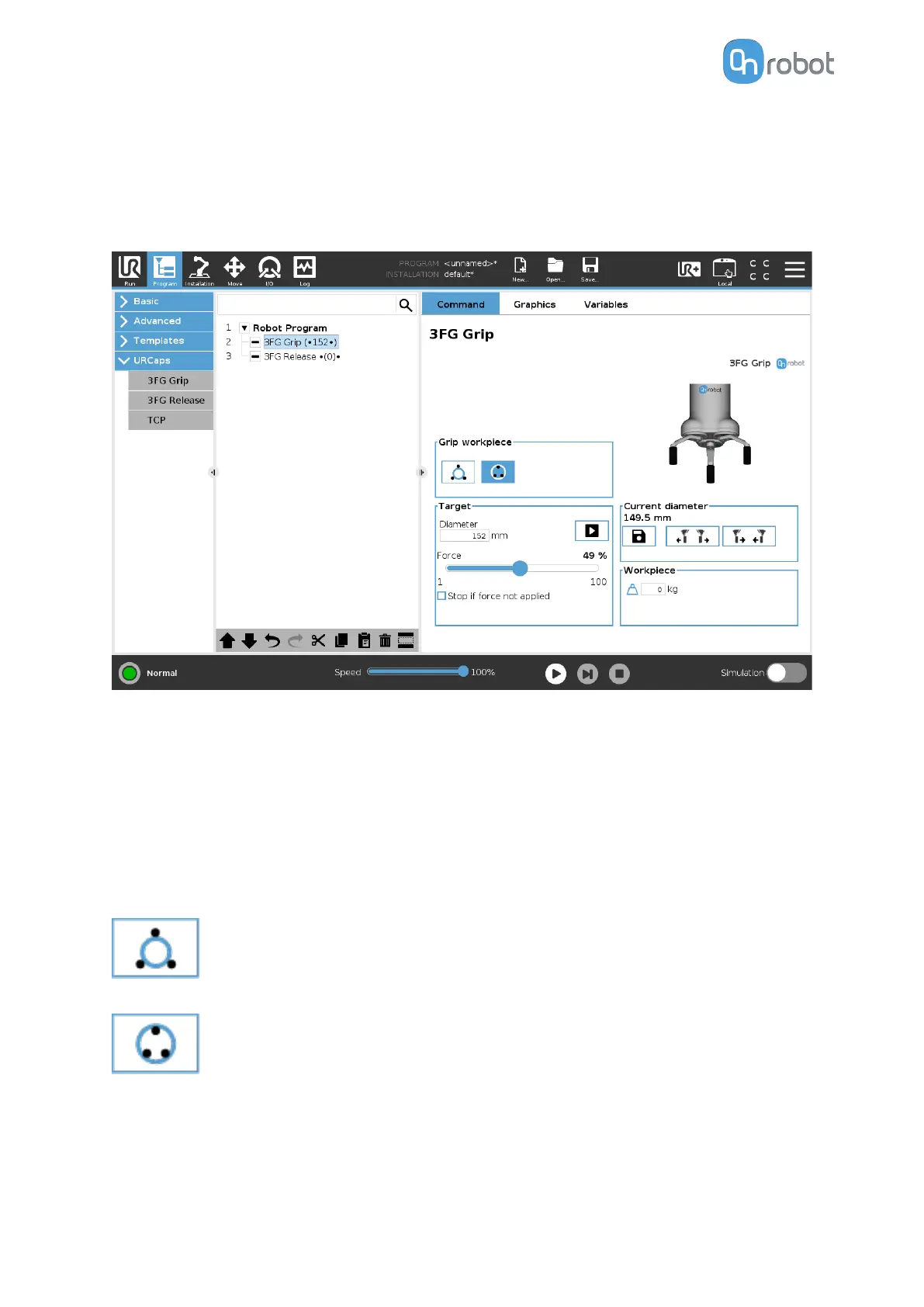
3FG Grip
When the 3FG Grip command is executed, the gripper will try to reach the specified target
(Diameter and Force). The dierent functions are explained below.
The command name in the robot program shows bullets • and a number in parenthesis (X).
•
•(x)• Bullets outside the parenthesis means external grip
•
(•x•) Bullets inside the parenthesis means internal grip
•
The number in parenthesis shows the target diameter
Select device
When two grippers are used, these buttons will select which one of the two grippers performs
the action. The active button will have a blue background.
Grip workpiece
select this if the workpiece will be gripped externally. If this is selected the
internal gripper diameter will be shown on the target and current diameter.
select this if the workpiece will be gripped internally. If this is selected the
external gripper diameter will be shown on the target and current diameter.
Target
OPERATION
63