will set the Current diameter as target diameter.
These are open and close hold-to-run buttons.
6.1.2. HEX-E/H QC
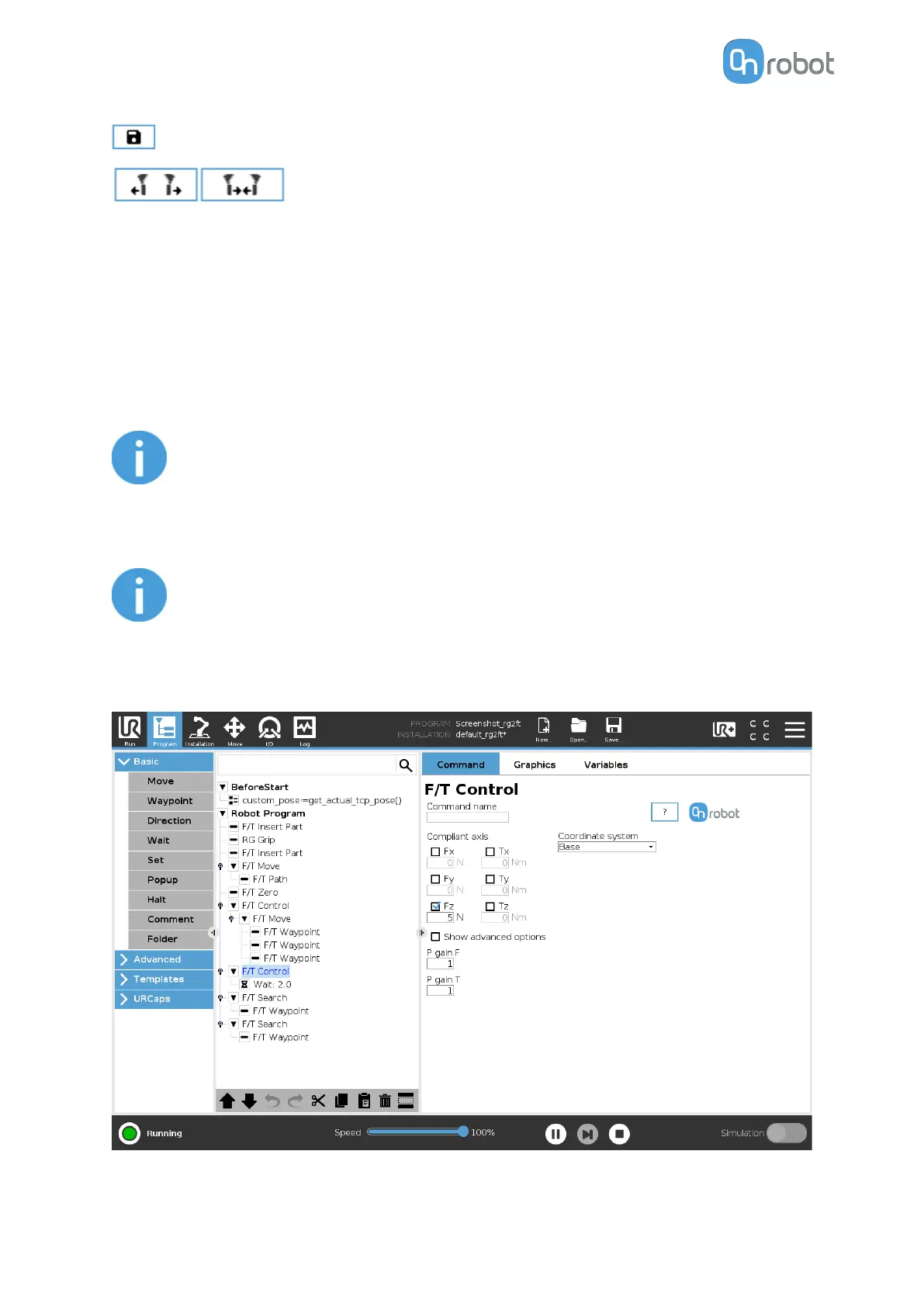
F/T Control
Applications such as polishing, deburring, sanding or grinding may require holding constant
force/torque to a defined direction during movements.
This command alters the trajectory of its child node(s) in order to keep the force/torque values
constant along/about the selected axes.
NOTE:
UR’s built-in Move commands cannot be used under the F/T Control
command. To move the robot under the force control, use the F/T Move or
F/T Search command instead.
NOTE:
To cancel any force/torque oset, execute an F/T Zero command at the
beginning of the F/T Control command and make sure the tool is not in
contact with any object before starting the F/T Control, otherwise the
command may not work properly.
OPERATION
67