8.1.3. HEX-H QC
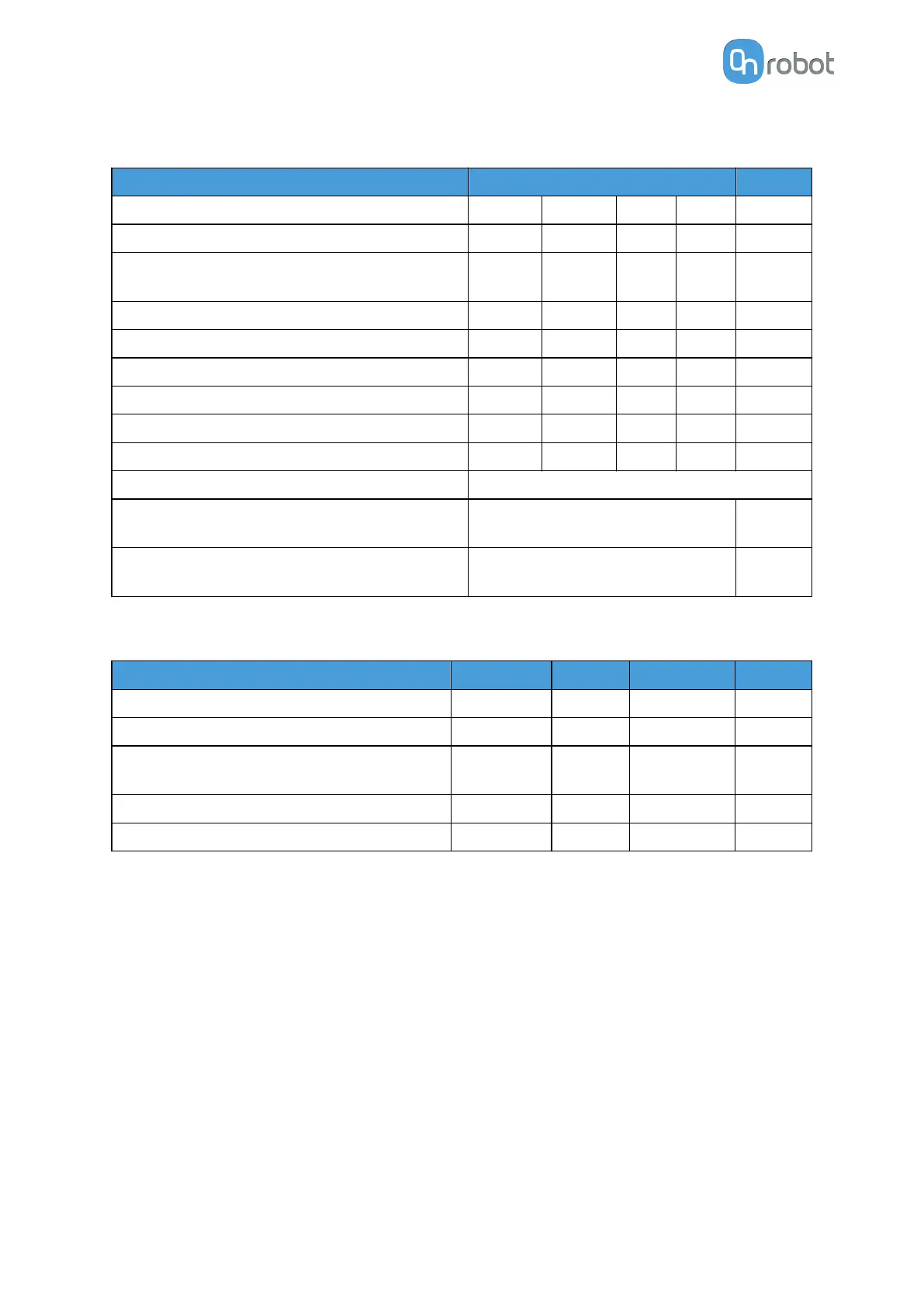
General Properties 6-Axis Force/Torque Sensor Unit
Fxy Fz Txy Tz
Nominal Capacity (N.C) 200 200 10 13 [N] [Nm]
Single axis deformation at N.C (typical) ± 0.6
± 0.023
± 0.25
± 0.009
± 2
± 2
± 3.5
± 3.5
[mm] [°]
[inch] [°]
Single axis overload 500 400 300 300 [%]
Signal noise* (typical) 0.1 0.2 0.006 0.002 [N] [Nm]
Noise-free resolution (typical) 0.5 1 0.036 0.008 [N] [Nm]
Full scale nonlinearity < 2 < 2 < 2 < 2 [%]
Hysteresis (measured on Fz axis , typical) < 2 < 2 < 2 < 2 [%]
Crosstalk (typical) < 5 < 5 < 5 < 5 [%]
IP Classification 67
Dimensions (H x W x L) 50 x 71 x 93
1.97 x 2.79 x 3.66
[mm]
[inch]
Weight (with built-in adapter plates) 0.35
0.77
[kg]
[lb]
* Signal noise is defined as the standard deviation (1 σ) of a typical one second no-load signal.
Operating Conditions
Minimum Typical Maximum Unit
Power supply 7 - 24 [V]
Power consumption - - 0.8 [W]
Operating temperature 0
32
-
-
55
131
[°C]
[°F]
Relative humidity (non-condensing) 0 - 95 [%]
Calculated MTBF (operating life) 30.000 - - [Hours]
Complex Loading
During single-axis loading, the sensor can be operated up to its nominal capacity. Above the
nominal capacity the reading is inaccurate and invalid.
During complex loading (when more than one axis is loaded) the nominal capacities are
reduced. The following diagrams show the complex loading scenarios.
The sensor cannot be operated outside of the Normal Operating Area (marked with blue on
the diagrams below).
HARDWARE SPECIFICATION
172