8.1.9. SG
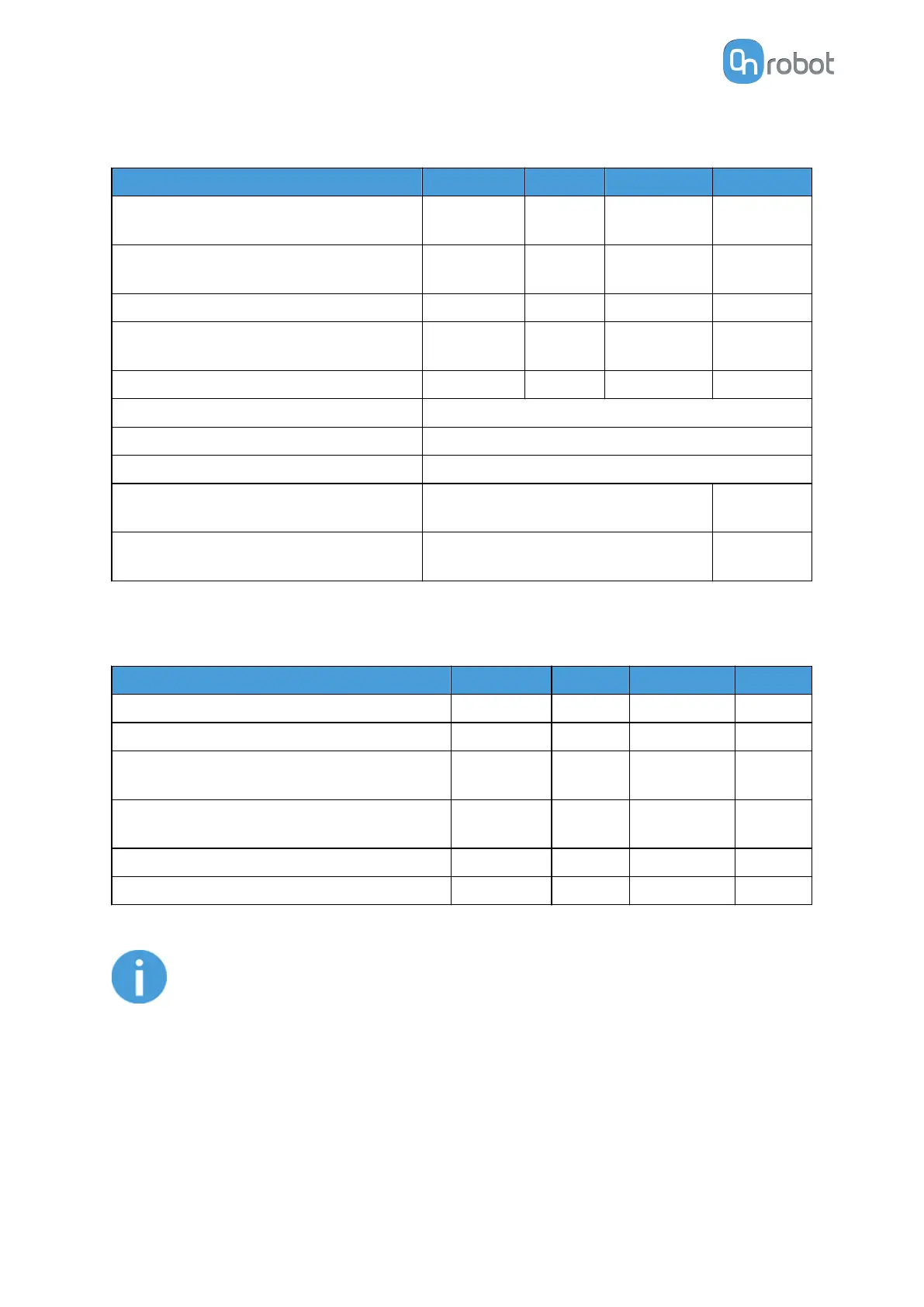
General Properties Minimum Typical Maximum Unit
Total spindle stroke 11
0.43
- 40
1.57
[mm]
[inch]
Spindle position resolution - 0.1
0.0039
- [mm]
[inch]
Spindle force - - 380 [N]
Spindle speed - - 37
1.46
[mm/s]
[inch/s]
Gripping time* (SG-a-H) - - 32 [grip/min]
SG-tool attachment mechanism Smart lock
Motor Integrated, electric BLDC
IP Classification IP67
Dimensions (H x Ø) 84 x 98
3.3 x 3.85
[mm]
[inch]
Weight 0.77
1.69
[kg]
[lb]
*Gripping time is tool depended. See the separate SG Datasheet for the tool specific gripping
time.
Operating Conditions
Minimum Typical Maximum Unit
Power supply 20 24 25 [V]
Current consumption 45 - 600 [mA]
Operating temperature 0
32
-
-
50
122
[°C]
[°F]
Storage temperature 0
32
-
-
60
140
[°C]
[°F]
Relative humidity (non-condensing) 0 - 95 [%]
Calculated MTBF (operating life) 30.000 - - [Hours]
NOTE:
For technical specification for the SG-tools, see the separate SG Datasheet.
How to Handle a Workpiece
With the elastic silicone SG tools, the gripper can handle a wide range of workpieces, for a
high number of applications. Dierent tool designs have some overlap in capability when
handling the same workpiece, but the tools have dierent characteristics and do have
individual eectiveness on a given workpiece.
HARDWARE SPECIFICATION
203