Rotation of the QC and the tool - whether the QC connector
points to A,B,C,D side of the Angle Bracket when mounted
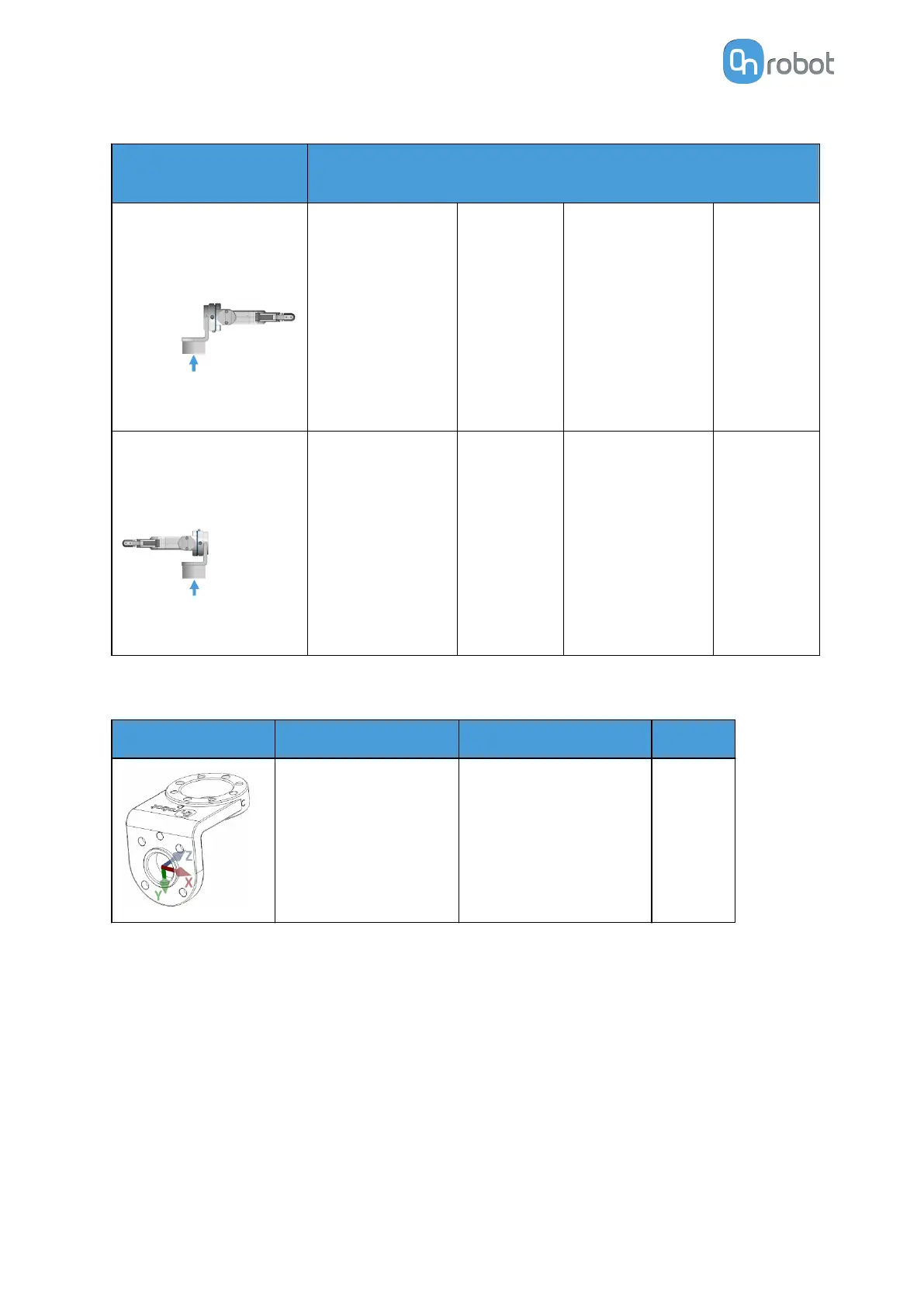
External mounting (QC
and tool are mounted
outward)
robot arm
Calculated (see
below)
Not
calculated
but
possible to
use
Not calculated
but possible to
use
Not
calculated
but
possible to
use
Internal mounting (QC
and tool are mounted
inward)
robot arm
Calculated (see
below)
Not
calculated
but
possible to
use
Not calculated
but possible to
use
Not
possible to
use
External mounting with QC connector on the A side
Coordinate system
TCP [mm] Center of Gravity [mm] Weight
X=0
Y= - 55 - (Tool Z value)
Z=63 + (Tool Y value)
RX=90°
RY=0°
RZ=0°
cX=0
cY= - 55 - (Tool Z value)
cZ= 63 + (Tool Y value)
0.207 kg
0.456 lb
Example with an RG2 tool:
HARDWARE SPECIFICATION
251