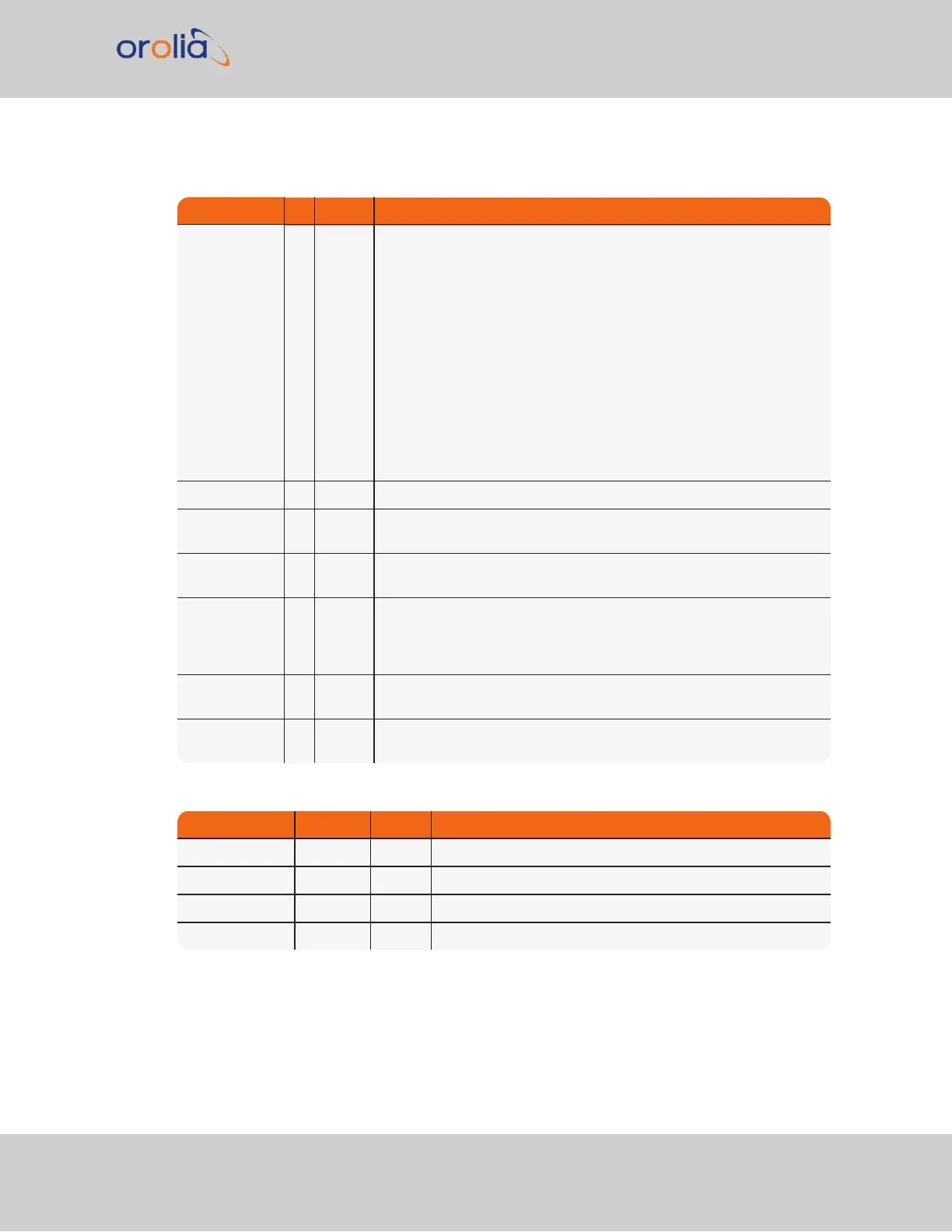
Name Bit Format Description
Mode 0 2 bits Indicates the current mode of the INS filter.
0 = Not tracking. GPS Compass is initializing. Output heading is based
on magnetometer measurements.
1 = Aligning. INS Filter is dynamically aligning. For a stationary startup:
GPS Compass has initialized and INS Filter is aligning from the mag-
netic heading to the GPS Compass heading. For a dynamic startup:
INS Filter has initialized and is dynamically aligning to True North
heading. In operation, if the INS Filter drops from INS Mode
2 back down to 1, the attitude uncertainty has increased above 2
degrees.
2 = Tracking. The INS Filter is tracking and operating within spe-
cification.
3 = Loss of GPS. A GPS outage has lasted more than 45 seconds. The
INS Filter will no longer update the position and velocity outputs, but
the attitude remains valid.
GpsFix 2 1 bits Indicates whether the GPS has a proper fix.
Error 3 4 bits Sensor measurement error code. See table below. 0 = No errors
detected.
Reserved 7 1 bit Reserved for internal use. May toggle state during runtime and should
be ignored.
GpsHeadingIns 8 1 bit In stationary operation, if set the INS Filter has fully aligned to the GPS
Compass solution.
In dynamic operation, the GPS Compass solution is currently aiding
the INS Filter heading solution.
GpsCompass 9 1 bit Indicates if the GPS compass is operational and reporting a heading
solution.
Reserved 10 8 bits Reserved for internal use. These bits will toggle state and should be
ignored.
Name Bit Offset Format Description
Reserved 0 1 bit Reserved for future use and not currently used.
IMU Error 1 1 bit High if IMU communication error is detected.
Mag/Pres Error 2 1 bit High if Magnetometer or Pressure sensor error is detected.
GPS Error 3 1 bit High if GPS communication error is detected.