0: Deceleration stop: if stop command is enabled, the inverter will reduce output
frequency in accordance with the deceleration method and defined deceleration time,
and finally stops when the frequency is reduced to 0Hz.
1: Free stop: if stop command is enabled, the inverter will stop output at once. Load
will freely stop according to the mechanical inertia.
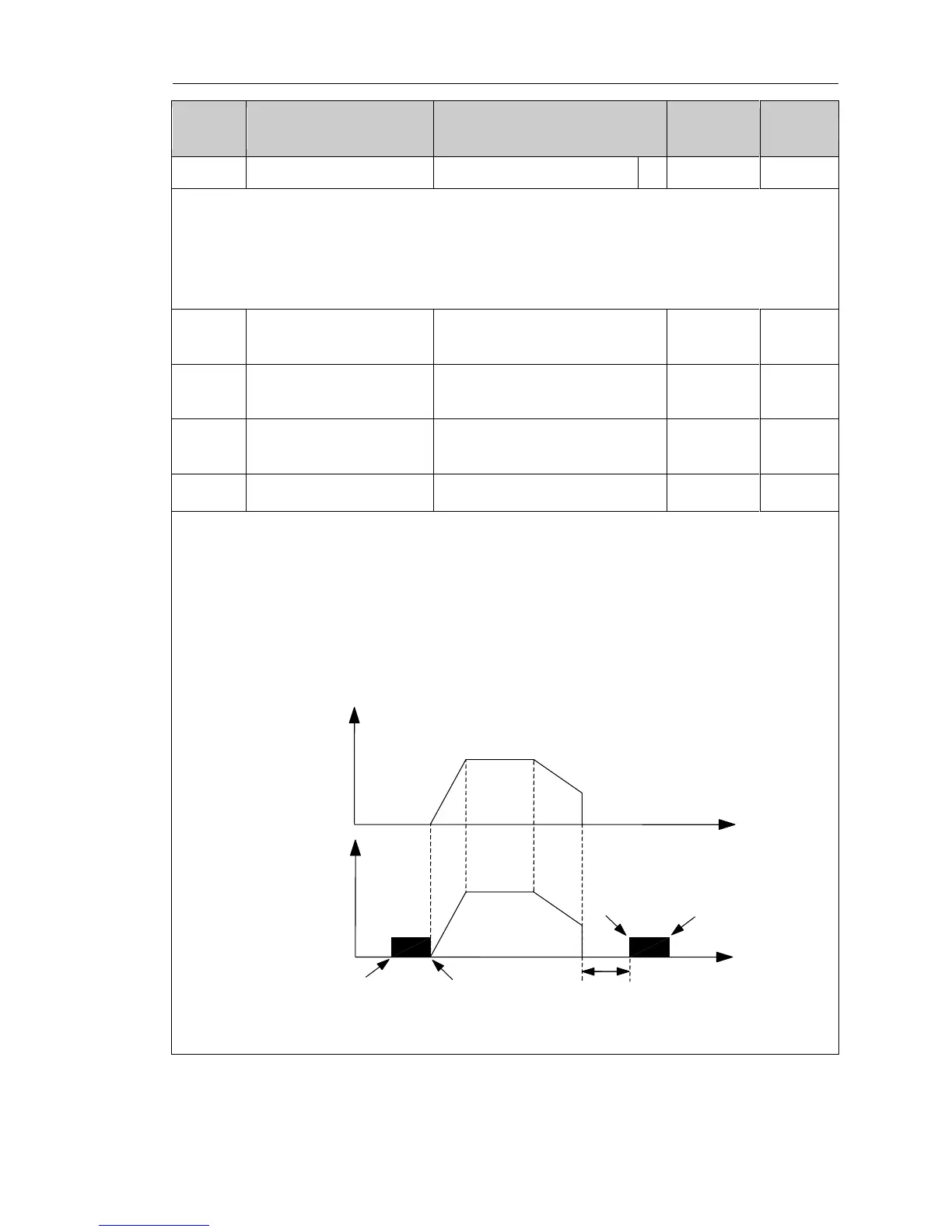
Initial frequency of stop braking: if the frequency is arrived when decelerating, DC
braking process will start. If the initial frequency of stop braking is 0, DC braking will
invalid, the inverter will stop at the set deceleration time.
Waiting time of stop braking: the inverter blocks output before performing stop DC
braking, and then starts DC braking again after the delay. Used to prevent the
overcurrent fault caused by DC braking at high speed.
Stop DC braking current: refers to the amount of the applied DC braking. The larger
the value, the greater the braking torque.
Stop DC braking time: refers to the duration of DC braking.
5-2-6.F4 Group - V/F control group
F4 group of function code is only valid to V/F control, invalid to vector control.

 Loading...
Loading...
