PreciseFlex_Robot
138
10. Remove the J2 Motor Interface PCA by removing 2 M3 X 8 SHCS. Cut the tie wrap securing the
J2 motor cables to the Z Carriage. Unplug the J2 motor and encoder cable from the J2 Motor
Interface PCA.
11. Disconnect the harness retaining clip from the Z carriage, but do not remove the clips that attach
the harness to the J2 pulley.
12. Uncoil the harness. One end will remain connected to the EChain and the other end connected
to the J2 Pulley.
13. Remove the J2 Belt Cover by removing 3 M3 X 10 FHCS, and pull it partially up the uncoiled
harness to expose the J2 timing belt.
14. Unsnap 3 or 4 of the EChain harness retaining segments, working up from the carriage, and fold
the Echain and harness back over the power supply side of the robot to get it out of the way.
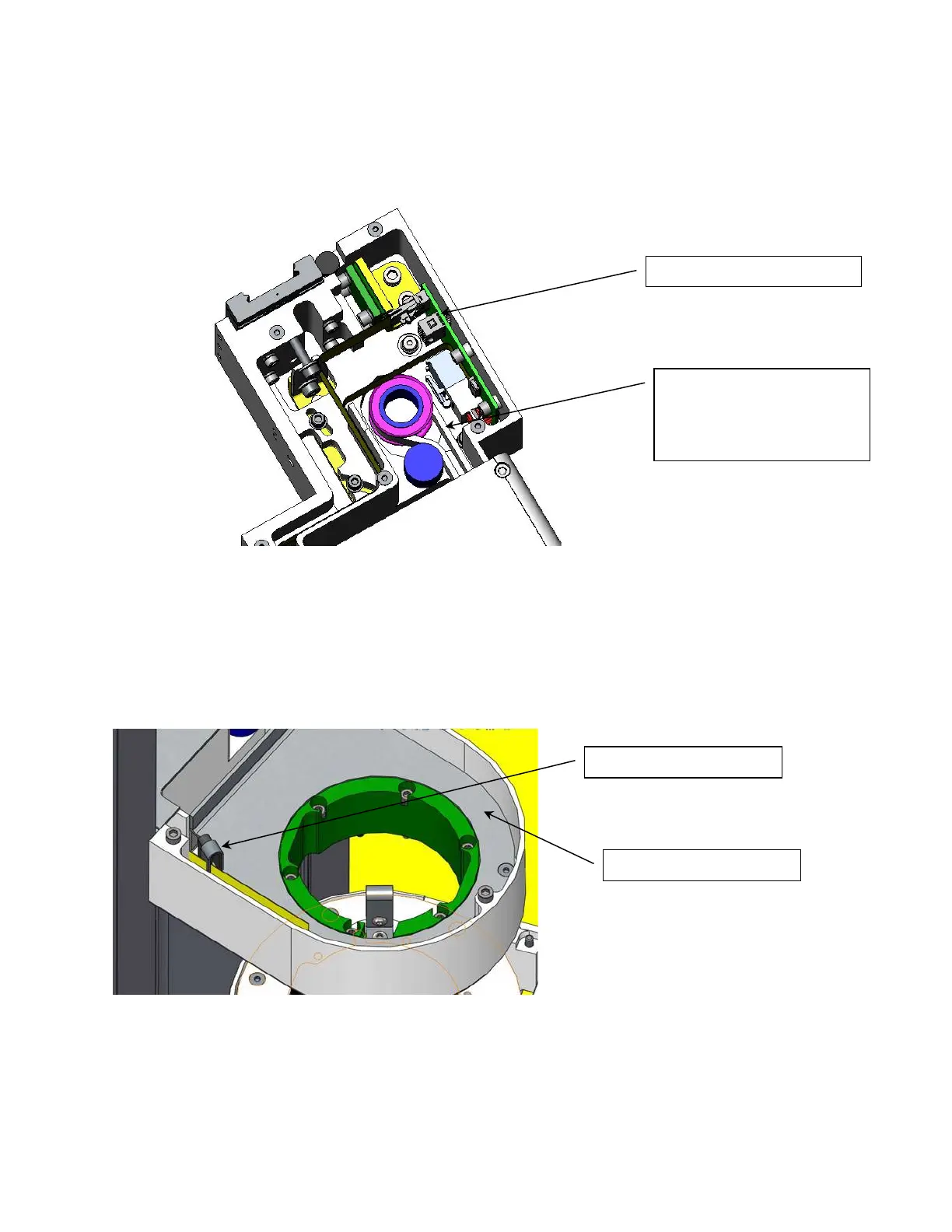
Harness retaining clip.
J2 Belt Cover.
J2 Motor Interface Board
Check Belt Tension on this
segment of belt by plucking
belt and measuring tension
with tension meter.