44 Rockwell Automation Publication 2198-RM004C-EN-P - March 2022
Chapter 3 Connectors
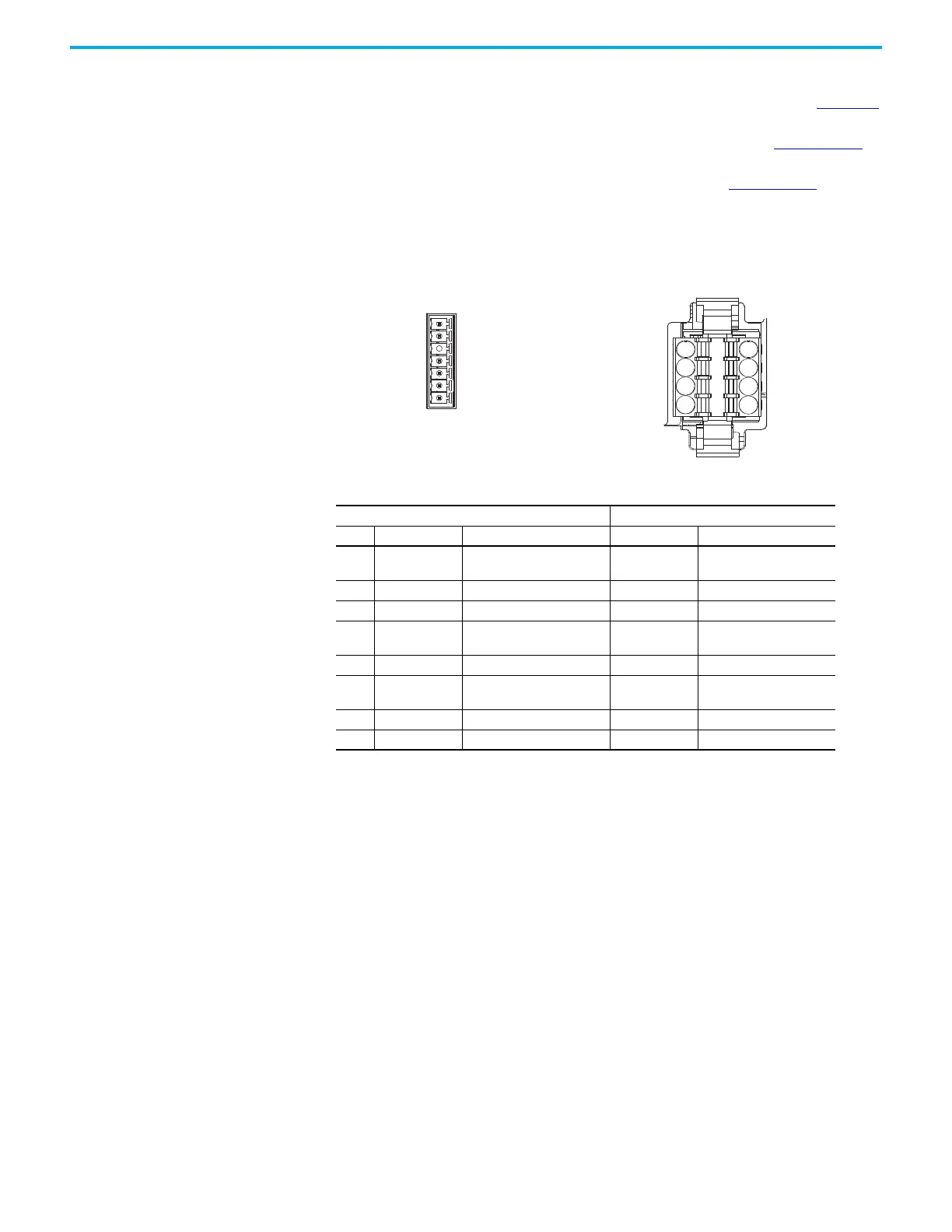
Safe Torque Off Connector Both the Kinetix 300 drive and Kinetix 5100 drive have a Safe Torque Off (STO)
connector. The STO pinouts are different between the two drives. See Figure 17
for a comparison of the two connectors. See the Kinetix 300
EtherNet/IP™ Indexing Servo Drives User Manual, publication 2097-UM001
for information on STO with the Kinetix 300 drive. See the Kinetix 5100 Single-
axis EtherNet/IP Servo Drives User Manual, publication 2198-UM004
for
information on STO with the Kinetix 5100 drive.
Figure 17 - STO Connector Assignment Comparison
Table 49 - STO Connector Assignment Comparison
Kinetix 300 Servo Drive Kinetix 5100 Servo Drive
Pin Signal Description Signal Description
1+24V DC control
+24V DC output from the
drive
SB+ used for jumper +
2 Control COM +24V DC output common SB- used for jumper -
3 Safety Status Safety status S1 STO 1 +
4 Safety Input 1
Safety input 1 (+24V DC to
enable)
S1C STO 1 -
5 Safety COM Safety common S2 STO 2 +
6 Safety Input 2
Safety input 2 (+24V DC to
enable)
S2C STO 2 -
7 — — SS+ Safety Status or Feedback
8 — — SS- Safety Status or Feedback
Kinetix 300 Drive
STO Connector
Kinetix 5100 Drive
STO Connector

 Loading...
Loading...




