24 Rockwell Automation Publication 2198-RM005A-EN-P - October 2020
Chapter 1 Replacement Considerations
Kinetix 5300 Motor Feedback Devices
The Kinetix 5300 drives accept motor feedback of various types on the MFB
feedback connector and auxiliary feedback signals from TTL incremental
encoders on the digital inputs and auxiliary feedback connector.
Motor feedback and auxiliary feedback can be used in these applications:
• Motor feedback
• Auxiliary feedback and feedback-only axis
• Load feedback (dual-loop control) and master feedback applications
Table 21 - Feedback General Specifications
Accessories
You can reuse motor power and feedback cables between Kinetix MP motors
and Kinetix 350 drives in Kinetix 5300 applications.
See Dimensions, Cables, and Wiring
for more details.
In some instances, existing shunt resistors used with Kinetix 350 drives can be
reused with Kinetix 5300 drives.
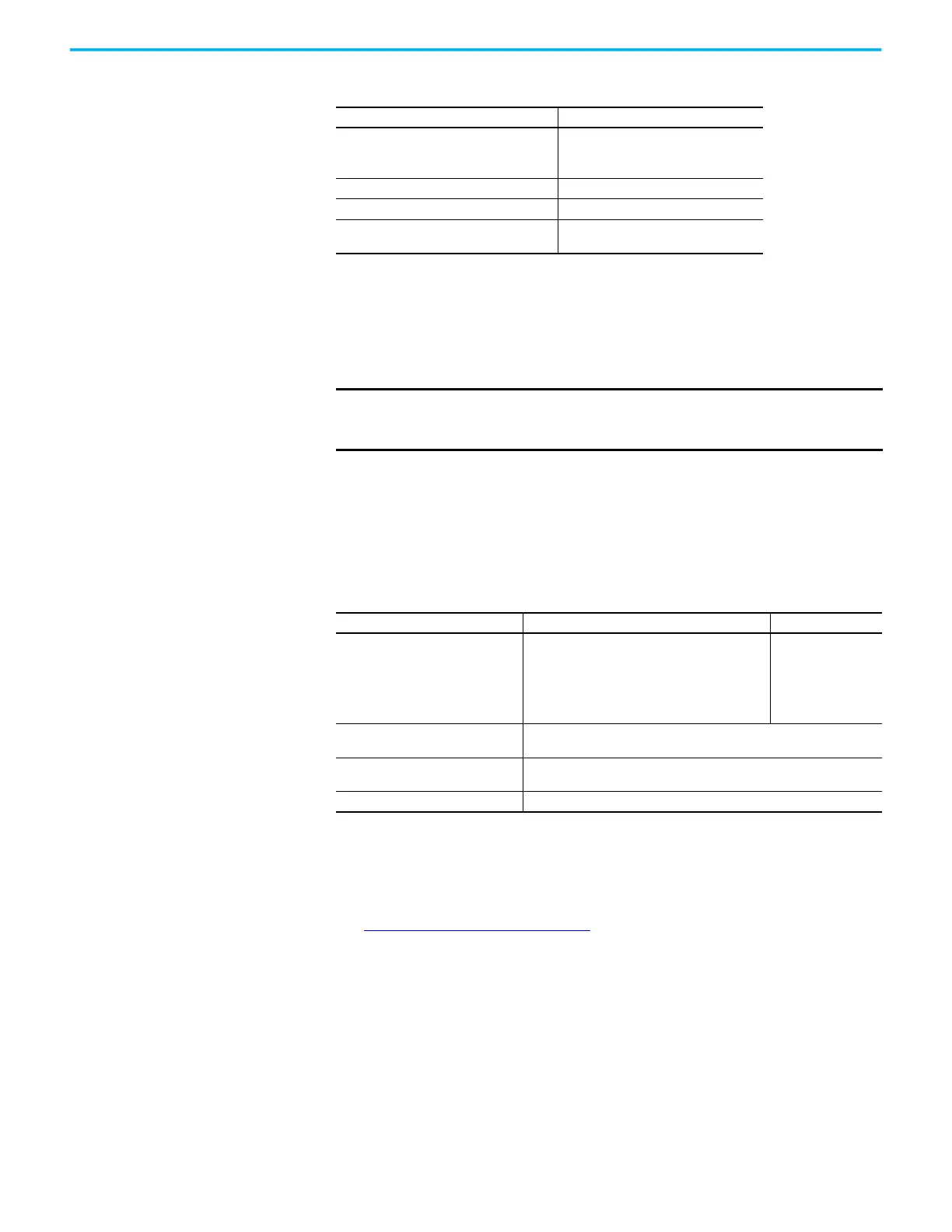
Table 20 - Motor Feedback General Specifications
Attribute Value
Feedback device support
• Hiperface
• Generic TTL Incremental
• Tamagawa 17-bit Serial
Power supply (EPWR5V) 5.13…5.67V, 400 mA, max
Power supply (EPWR9V) 8.3…9.9V, 275 mA, max
Thermostat
Single-ended, under 500 Ω = no fault, over
10 kΩ = fault
IMPORTANT
Auto-configuration in the Logix Designer application of intelligent
absolute, high-resolution encoders, and incremental encoders is
possible with only Allen-Bradley motors.
Attribute Motor Feedback Auxiliary Feedback
Feedback device support
• Hiperface
• Tamagawa (17-bit) serial
(Kinetix TL and TLY motors)
• Nikon (24-bit) serial (Kinetix TLP motors)
• Generic TTL Incremental
• Generic Sine/Cosine Incremental
Generic TTL
Incremental
Power supply voltage (MTR_EPWR5V)
Power supply current (MTR_EPWR5V)
5.10…5.40V
300 mA, max
Power supply voltage (MTR_EPWR9V)
Power supply current (MTR_EPWR9V)
8.10…9.90V
150 mA, max
Thermostat Single-ended, under 500 Ω = no fault, over 10 kΩ= fault

 Loading...
Loading...











