150 Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
Friction Compensation
The friction compensation block is used to calculate breakaway torque and the
torque required to keep the motor running at a constant speed due to friction.
For more information on friction compensation, see Friction Compensation
on
page 57.
Virtual Encoder
The virtual encoder can be used as a position master for position follower
applications (see Position Loop - Follower (Electronic Gearing)
on page 90 for
details on position control). The advantage of following a virtual encoder instead
of actual encoder feedback is that the virtual encoder reference is much smoother
and is not subject to noise.
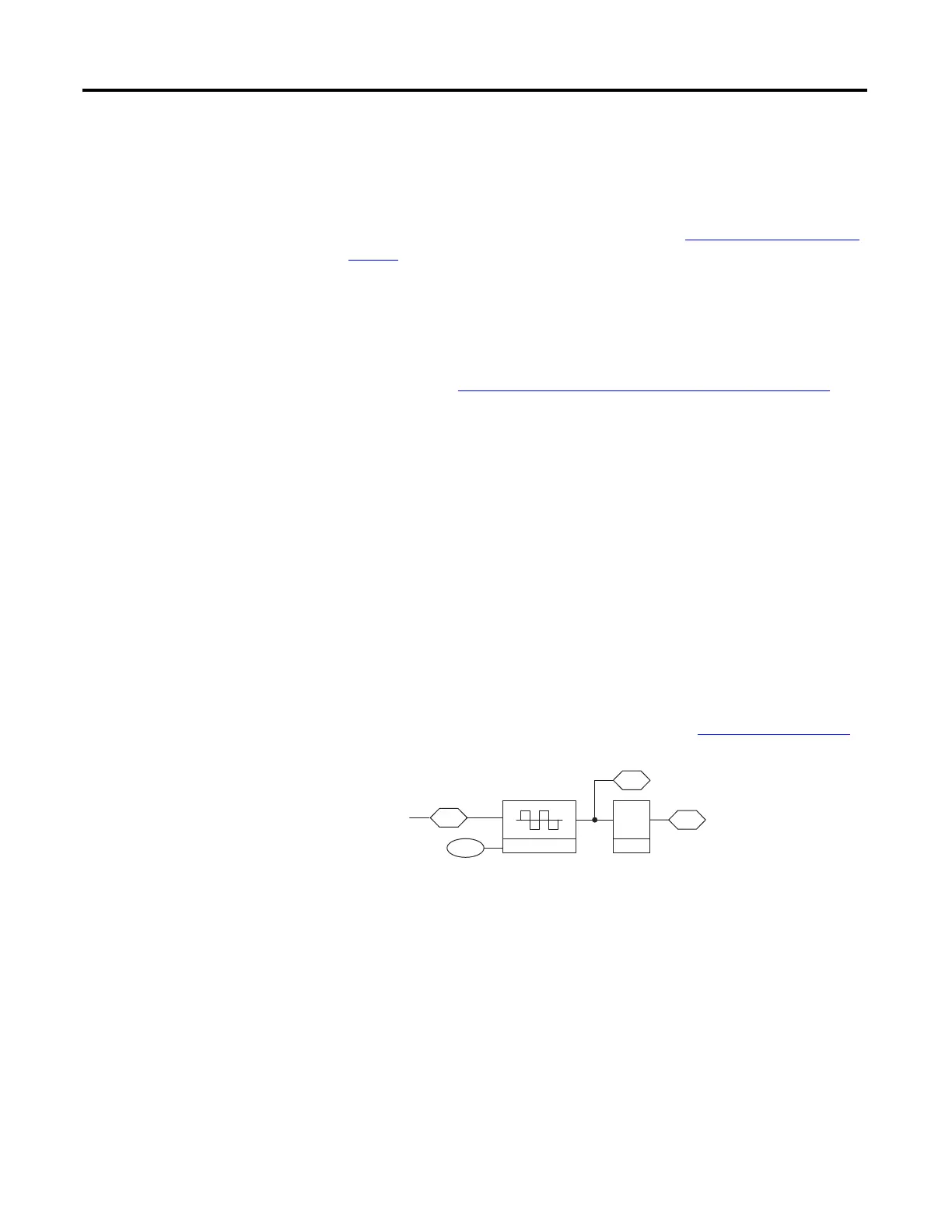
The virtual encoder block generates a position counter based on the speed
reference in parameter 43 [Ramped Spd Ref ]. Parameter 61 [Virt Encoder EPR]
is used to specify the desired edges per revolution for the virtual encoder. For
example if parameter 61 is 4096 EPR, this would be equivalent to a 1024 PPR
quadrature encoder.
Parameter 62 [Virt Encdr Posit] is a 32-bit integer that contains the pulse count
output of the virtual encoder block.
Parameter 63 [Virt Encdr Dlyed] is a 32-bit integer that contains the pulse count
output of the virtual encoder block delayed by one scan of the speed reference
loop. This parameter can be used to send a virtual position reference over
SynchLink for position follower applications. Refer to SynchLink
on page 180
for more details.
61
62
63
Virtual Encoder
Virt Encoder EPR
Delay
One
Scan
43
Ramped Spd Ref
from Ramp
Virt Encdr Posit
Virt Encdr Dlyed
 Loading...
Loading...










