Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011 91
Detailed Drive Operation Chapter 1
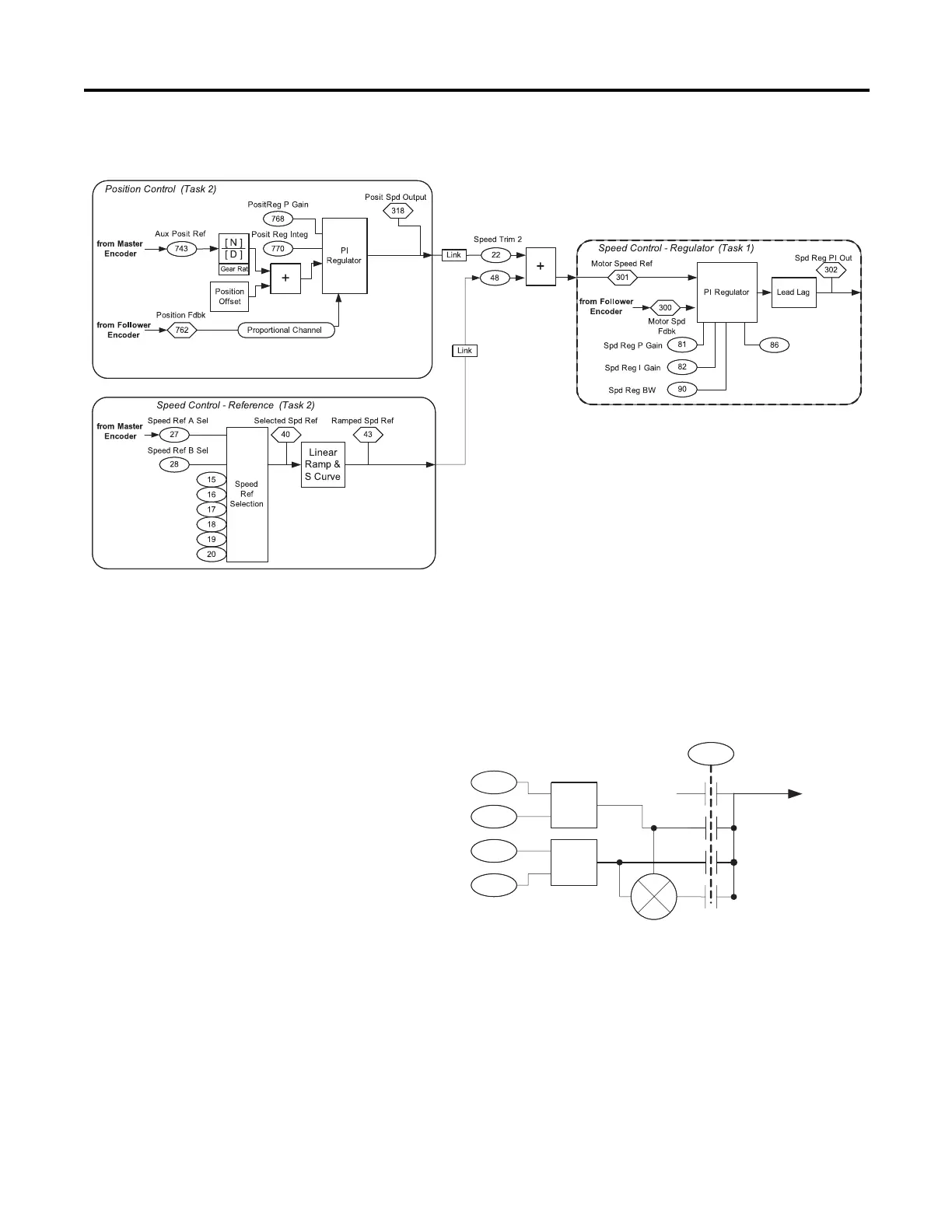
The following is a block diagram overview of the position follower mode:
Speed Reference Selection
For the position following mode to work properly, there needs to be a feed
forward speed reference for the speed loop of the drive to follow.
For example, to follow Encoder 1, link parameter 12 [Speed Ref 2] to parameter
241 [Encdr1 Spd Fdbk]. Set parameter 27 [Speed Ref A Sel] = 2 “Speed Ref 2.”
When a gear ratio is used in the position loop, parameter 13 [Spd Ref2 Multi]
must be setup to match the gear ratio set in the position loop.
Spd Reg Droop
Spd Ref Bypass2
Preset Speed 2
Preset Speed 3
Preset Speed 4
Preset Speed 5
Preset Speed 6
Preset Speed 7
10
11
12
0
1
2
3
X
13
27
0
/
Speed Ref 1
Spd Ref1 Divide
Speed Ref 2
Spd Ref2 Multi
Speed Ref A Sel
+
+
 Loading...
Loading...










