17 of 51
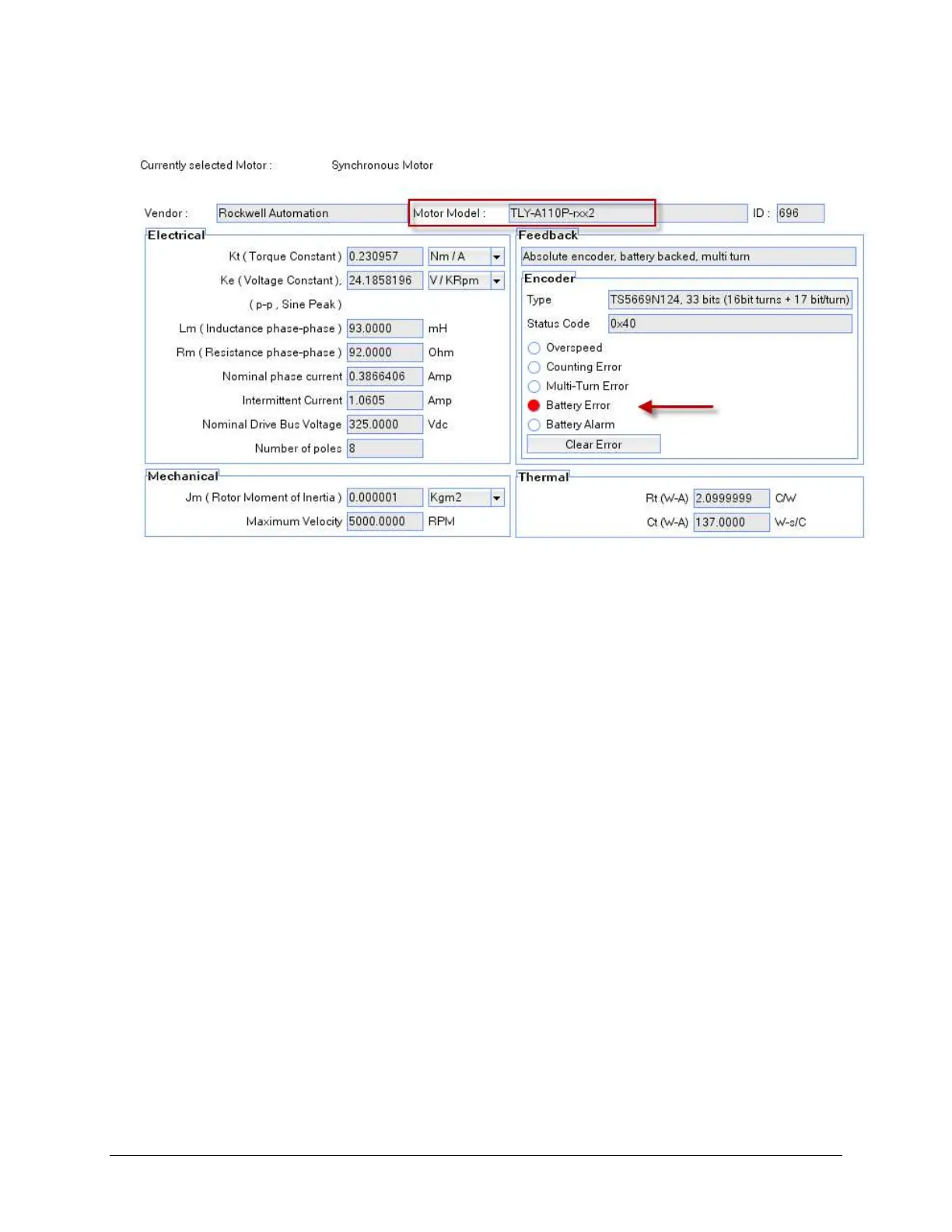
13. Let’s look at the motor that is selected.
The motor that is in the demo unit is a TLY-A110P-BJ62AA. This motor has an absolute encoder
(multi-turn), so the drive communicates with the encoder to get the motor model number and
populates it for you.
This TLY motor employs a battery to maintain the absolute motor position, which is usually located in
the feedback low-profile connector. Because the demo does not contain a battery, a Battery Error is
indicated. This will not affect the motor operation, only the ability to maintain position if the motor
rotates more than one revolution without power.
NOTE: Allen-Bradley motors and actuators with intelligent feedback devices will automatically be
populated into the motor configuration. For Allen-Bradley motors and actuators with incremental
encoders, the device would need to be chosen from a listing of available motors.
Choosing the Operating Mode
The Kinetix 300 drive can operate in one of several modes which are shown below:
Auto Tune
EtherNet/IP External Reference
Master Gearing
Step and Direction
Analog Velocity Input
Analog Current Input
Indexing
This lab will focus on modes; Auto Tune, Indexing and EtherNet/IP External Reference.

 Loading...
Loading...









