32 of 51
Explanation of Indexing AOI
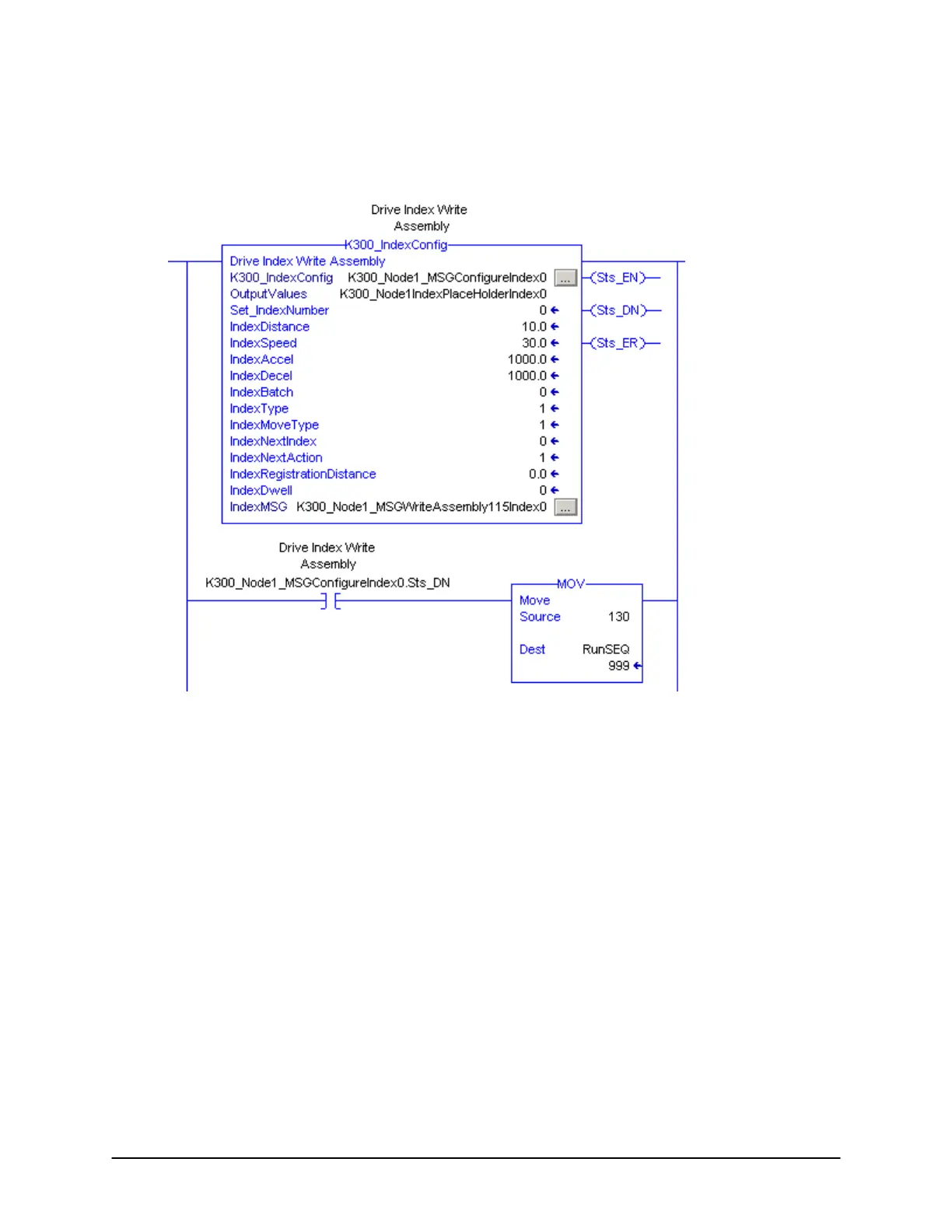
K300_IndexConfig: a tag of type K300IndexConfig, this tag is created upon the import of the rung and
provides the status bits, EN,DN,ER and the ‘holding’ location for move parameters you can enter for the
Index. When the instruction enables, the EN bit is set, if the configuration is valid and completes
successfully, the DN bit is set, and if the instruction errors because of an invalid parameter or something
else, the ER bit is set
OutputValues: a tag of type UDT_K300_Index, this is also created upon import and provides a place for
you to ‘auto load’ the index parameters from an array or other mechanism to load multiple indexes with
one instruction. If you decide to use one AOI per index, as shown in this example, then your Output
values is no more than a Place Holder for your index information, hence the tag name PlaceHolderIndex0
Set_IndexNumber: This is where you enter the index you would like to configure, valid entries are 0-31
IndexDistance: The distance of the index, in engineering units(i.e.: revs, mm, whatever the drive is
configured for), this value can be – or + sense to designate direction of the index
IndexSpeed: The speed of the index also in engineering units, this value is + only, a zero or negative
value will result in an error
Index Accel: The acceleration rate for the index in engineering units, this value is + only, a zero or
negative value will result in an error

 Loading...
Loading...









