23 of 51
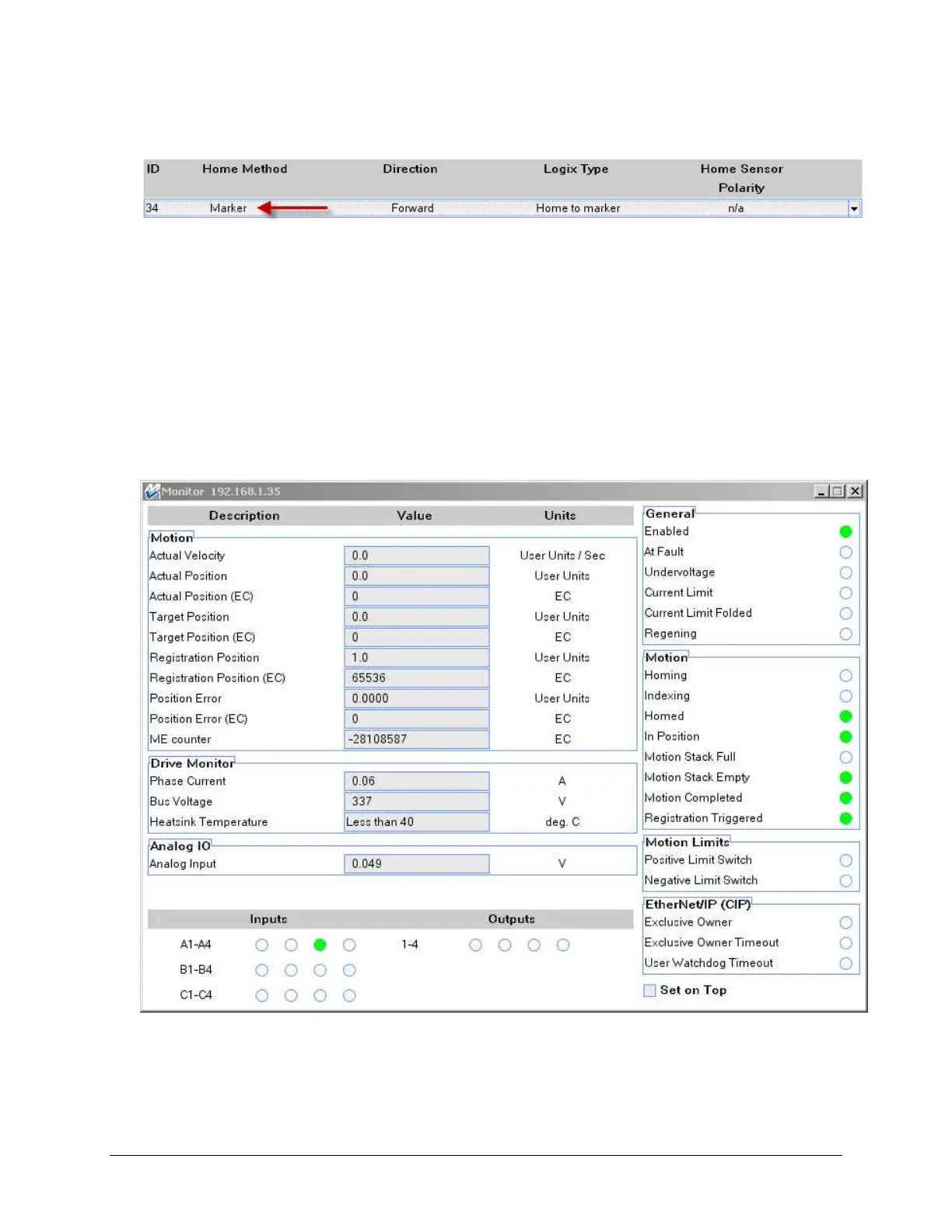
37. For the Homing Method choose Marker – Forward (ID 34) from the drop-down list.
38. Click the Start Homing button to initiate the homing sequence.
You should see the motor rotate until it finds the index marker on the encoder and then settle in. The
Homing Status should change from Not Homed to Homed. You can re-initiate the sequence again to
see the motor rotate.
NOTE: The motor in the demo unit has an absolute feedback encoder, but because there is no
battery to power the encoder on a power cycle, the motor is seen as an incremental device. That
means on a power cycle we would need to re-home again for absolute positioning.
39. If you click the Monitor branch of the Drive Organizer you have access to all the status information
within the drive.
40. Go back to the Indexing branch and configure an index to do an Absolute Position move and monitor
the status information. You may need to configure the Action to Stop if the move continuously
executes.

 Loading...
Loading...









