29 of 51
Rung 8: When the first motion profile is finished, the program will dwell for 500ms and load the
second motion profile values.
Rung 9: Starts executing the second motion profile.
Rung 10 & 11: When the second motion Profile is complete, the program will dwell for 500ms and
start the first profile again.
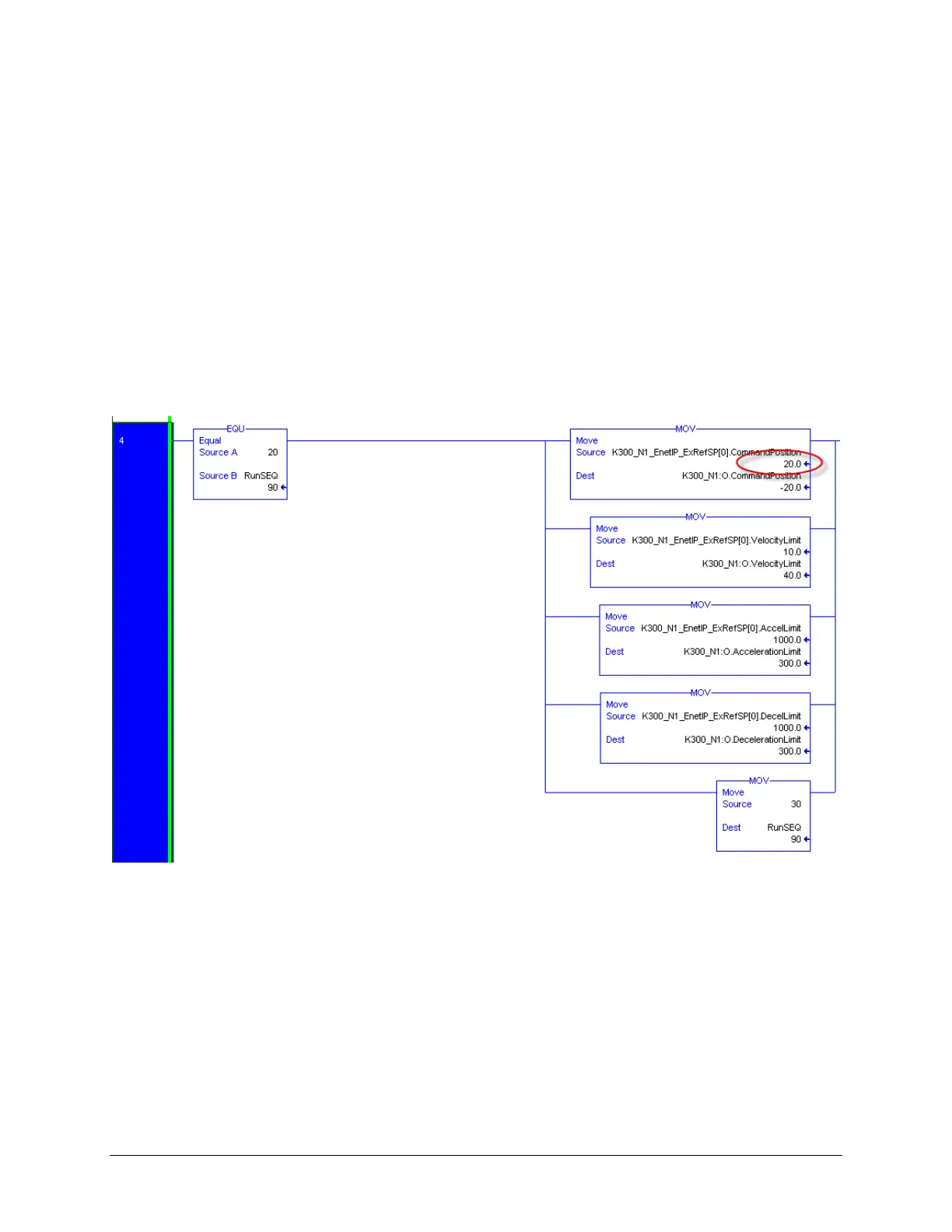
10. Modify the value for the Motion Profile 1 Distance by changing Command Position from 20 to
30.
Note: If a negative value for CommandPosition is entered, this will cause the motor to travel in
the reverse direction.
11. Repeat the above step for the Velocity (Must be Positive), Acceleration and Deceleration (Must
be > 0). Choose your own values for these parameters.
12. Run the new motion profile.
13. Close the RSLogix 5000 program when you are done.

 Loading...
Loading...









