3-3
Level Controller Configuration
PID CONTROLLER
DESCRIPTION
AND DETAILS
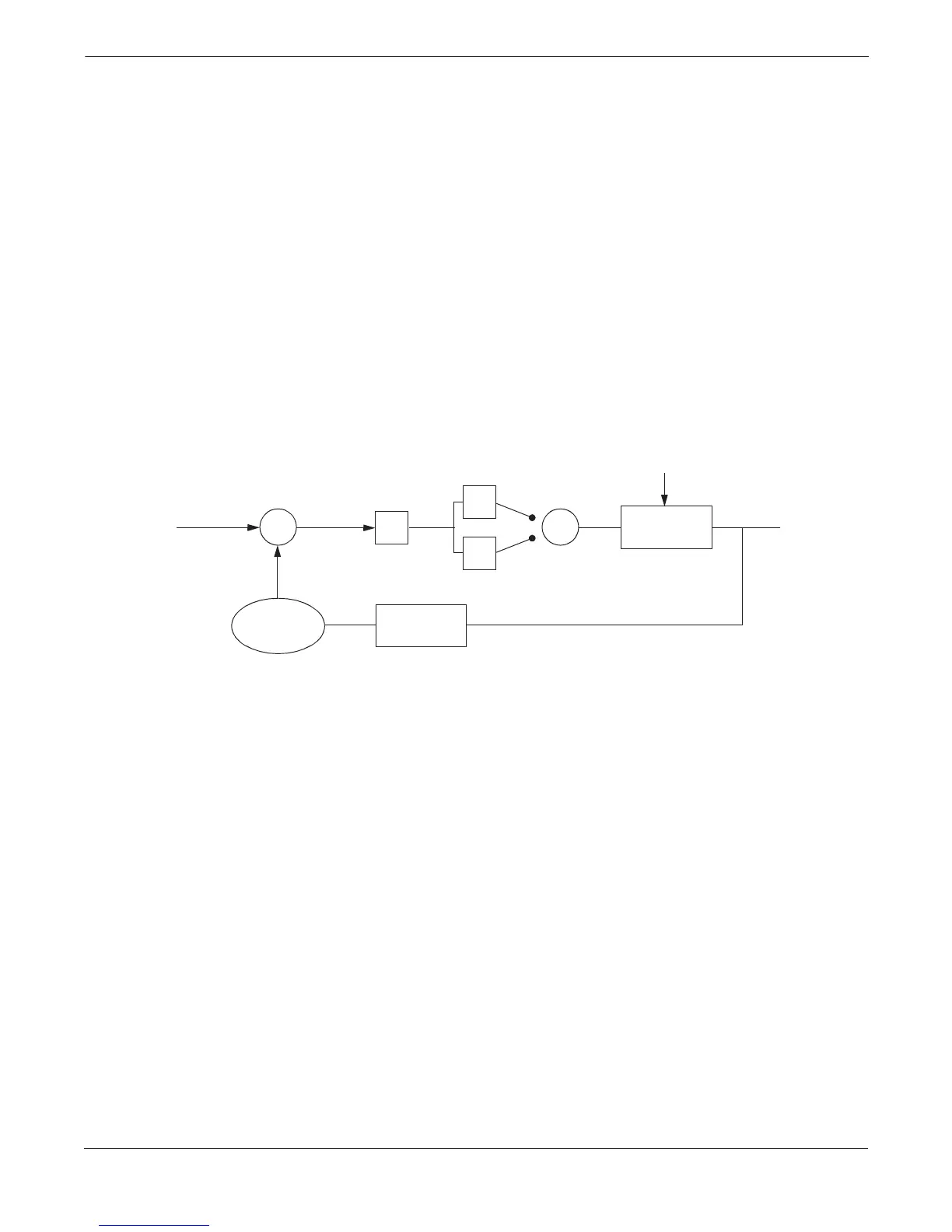
The Model 3095 Multivariable Level Controller features a series-type
controller for Proportional (P), Proportional and Derivative (PD),
Proportional and Integral (PI), and Proportional-Integral-Derivative
(PID) control modes.
The controller algorithm:
• Sets the control type (PID)
• Performs Start-up, Control Output, and Mode Shedding
• Activates modes (out-of-service, manual, auto)
• Provides a “bumpless transfer” between mode transitions
• Initiates Setpoint, Rate Limits, and Setpoint Tracking
• Initiates power-up variables
• Initiates Adaptive Bias and Manual Bias
The controller algorithm is updated three times per second. Although
the Level Controller can perform several tasks in Auto Mode, some
specific tasks must be completed in Manual or Out-of-Service mode.
Table 3-1 provides a list of Level Controller tasks and the modes in
which those tasks must be performed.
S
P
Setpoint
+
–
I
D
S
Process
Disturbance
Level
Level
Calculation
DP
Measure
FIGURE 3-2. PID Block Diagram.