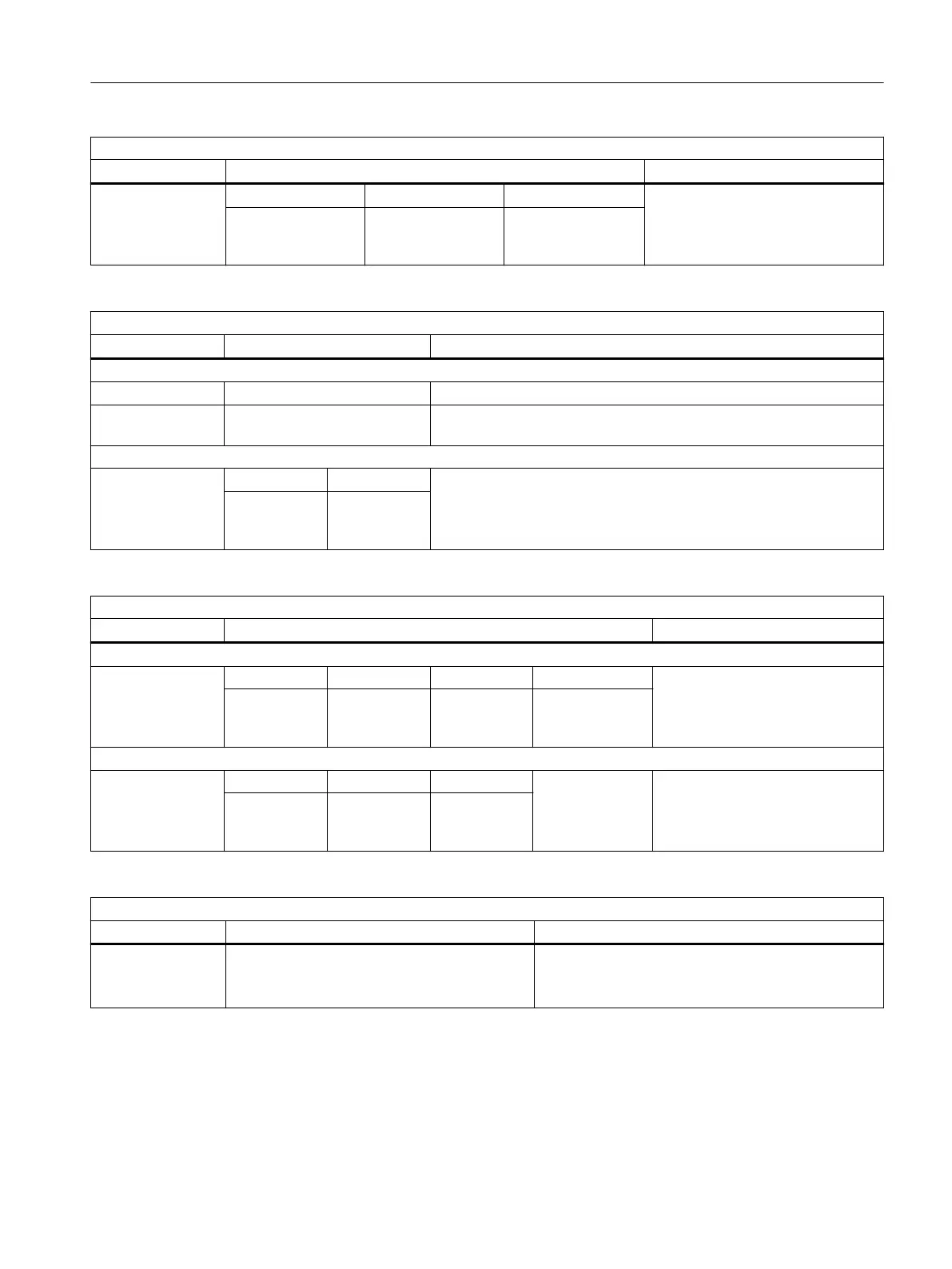
Retraction
Identifier Parameter Explanation
POLFA 1. 2. 3. Retraction position for single axes
AXIS:
Channel axis identi‐
fier
INT:
Type
REAL:
Value
Collision avoidance
Identifier Parameter Explanation
1.
PROTA STRING:
"R"
Request for a recalculation of the collision model
PROTS 1. 2. - n. Set protection area status
CHAR:
Status
STRING:
Protection
zone name
Intelligent load adjustment
Identifier Parameter Explanation
CADAPTON 1. 2. 3. 4. Activate load adjustment
INT:
Status
AXIS:
machine axis
name
INT:
input variable
REAL:
input value (op‐
tional)
CADAPTOF 1. 2. 3. Deactivate load adjustment
INT:
Status
AXIS:
machine axis
name
INT:
input variable
Jerk adaptation
Identifier Parameter Explanation
CALCFIR Adapting the FIR jerk filter to the dynamic mode
CALCFIR is used in the CUST_832 manufacturer cy‐
cle.
Tables
4.4 Predefined procedures
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 1287
 Loading...
Loading...

















