Service Protocol
AG05
Date: 15.06.2016 Art. No. 85677 Mod. status 139/16 Page 43 of 64
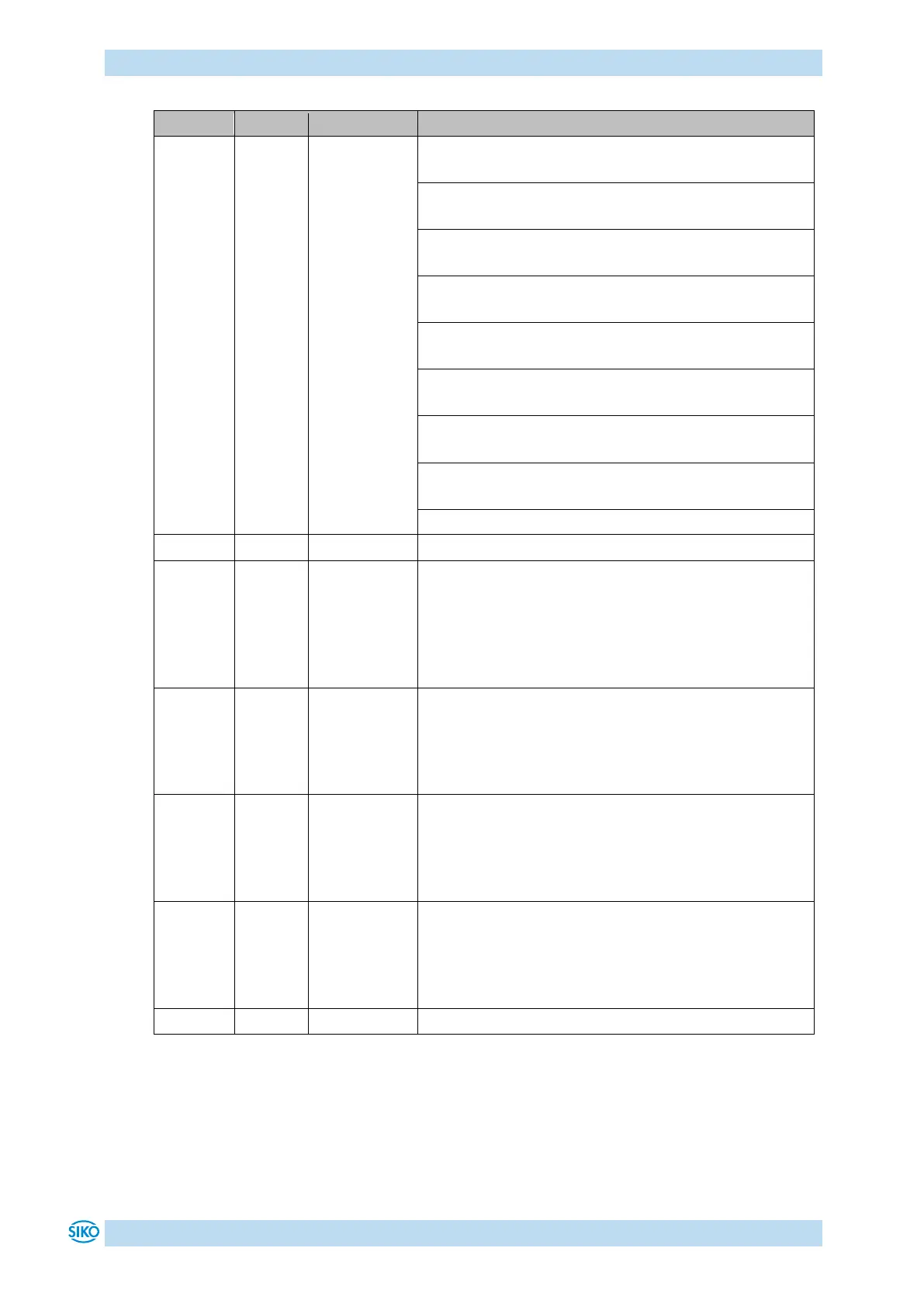
yy = 03 Error 3 (see chapter 8: Parameter description
Parameter no. 64)
yy = 04 Error 4 (see chapter 8: Parameter description
Parameter no. 65)
yy = 05 Error 5 (see chapter 8: Parameter description
Parameter no. 66)
yy = 06 Error 6 (see chapter 8: Parameter description
Parameter no. 67)
yy = 07 Error 7 (see chapter 8: Parameter description
Parameter no. 68)
yy = 08 Error 8 (see chapter 8: Parameter description
Parameter no. 69)
yy = 09 Error 9 (see chapter 8: Parameter description
Parameter no. 70)
yy = 10 Error 10 (see chapter 8: Parameter description
Parameter no. 71)
hh = value represented as hex
Enter positioning type
y = 0: Direct positioning
y = 1: Positioning with loop positive
y = 2: Positioning with loop negative
(see chapter 8: Parameter description Parameter no.
19)
Start of travel job
Positioning mode:
- start positioning process to programmed set point
Rotational speed mode:
- start of speed mode
Motor stop fast
Motor brakes with maximum deceleration. Motor
remains in control state!
Notice! If a contouring error is pending at the time of
the 'N' command, the motor will be enabled.
Motor stop
Motor brakes with programmed deceleration. Motor
remains in control state!
Notice! If a contouring error is pending at the time of
the 'O' command, the motor will be enabled.
 Loading...
Loading...