IMU User Guide revision 3.1 SMC Ship Motion Control www.shipmotion.eu
4.2.15 PSMCT
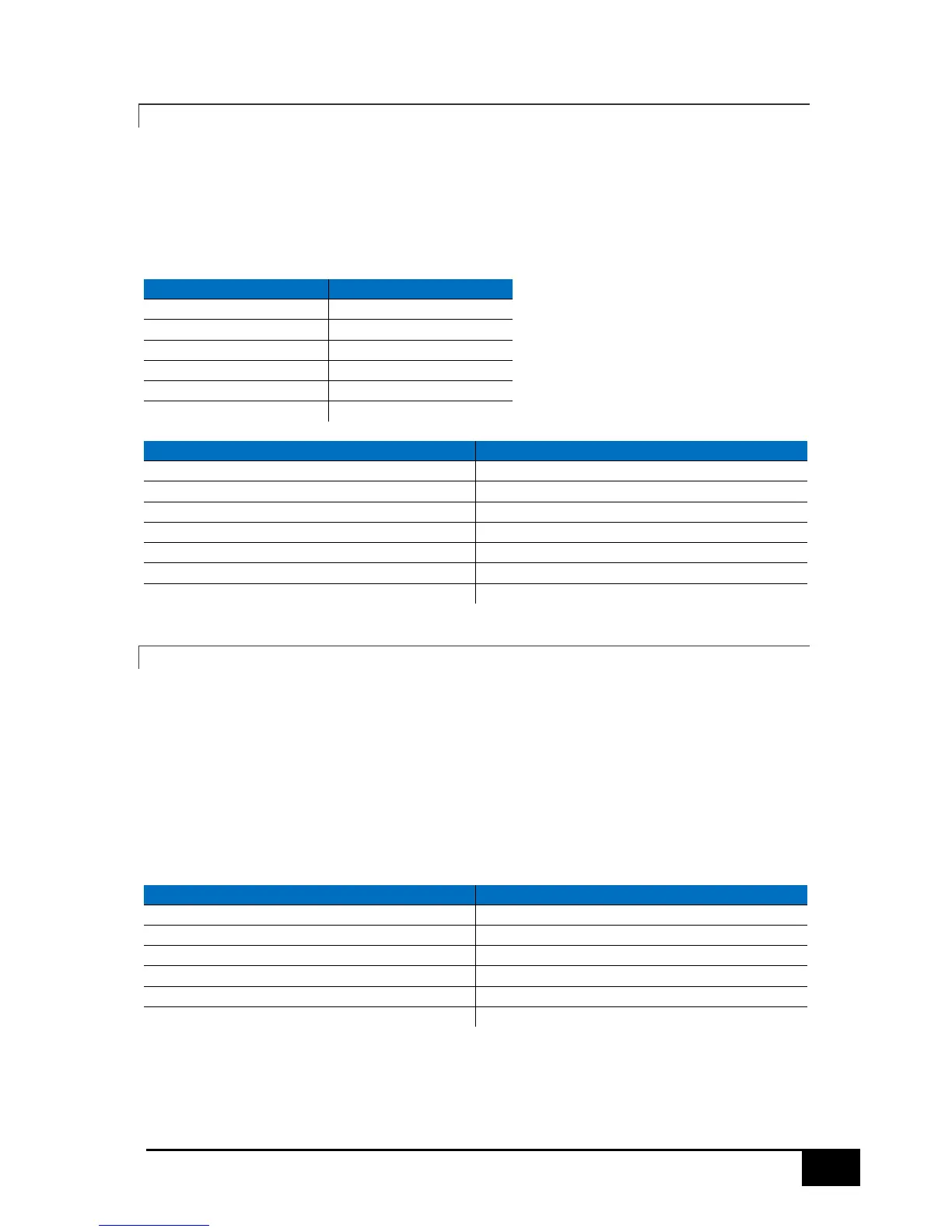
Available in hardware versions that includes a Real Time Clock
Data Frame
$PSMCT, YYYY/MM/DD,HH:MM:SS.SS,±xx.xxx,±yy.yyy,±hh.hh<CR><LF>
Example
$PSMCT,2016/04/04,15:27:39.50,-18.630,-14.328,+00.21
Degrees Resolution 0.001° (+ve=port up)
Degrees Resolution 0.001° (+ve=bow down)
4.2.16 SMCU
Note: PSMCU is a combined output together with $PSMCE when a GPS is connected to the motion
sensor and sends a time stamp message. The accepted GPS messages are the ZDA and RMC.
Data Frame
$PSMCU,HHMMSS,DDMMYY,s*cs<CR><LF>
The message is only sent on new inputs from the GPS
Example
$PSMCU,075438,230994,A*3D
GPS status, A = Ok and V = Warning

 Loading...
Loading...
