Name of
the
controller
setting
software
(code)
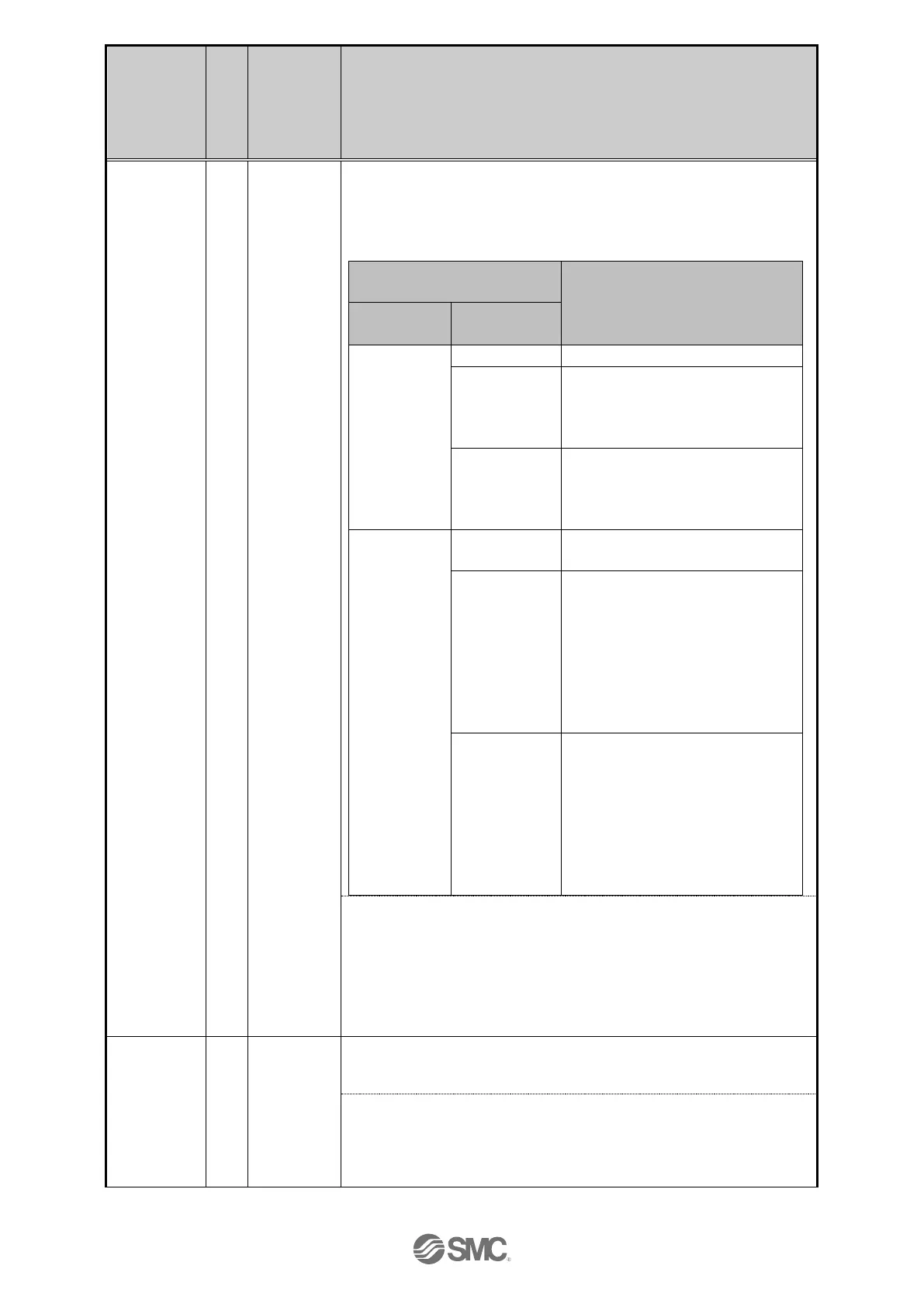
Alarms and countermeasures
ORIG
switch
direction
(1-103)
< Details >
The origin sensor does not respond correctly when a Return to
origin operation is performed with the origin sensor. An Alarm is
generated depending on the set value of the Return to origin
parameter.
Return to origin parameter
Value
0: Return to
origin by
pushing
force
(No alarm will be generated).
The end position is detected
when the sensor has been off
since the Return to origin
operation started.
The end position is detected
when the sensor has been on
since the Return to origin
operation started.
2,3: Sensor
Return to
origin
Immediately after inputting a
command to Return to origin
The end position is detected
when the sensor has been off
since the Return to origin
operation started, or the end
position is detected after the
sensor ON is detected and
before the Return to origin
operation is completed.
The end position is detected
when the sensor has been on
since the Return to origin
operation started, or the end
position is detected after the
sensor OFF is detected and
before the Return to origin
operation is completed.
<Countermeasure>
-If the ORIG mode is "0: Return to origin by pushing force"
Set the return to origin sensor at 0.
- If the ORIG mode is "2 or 3: Return to origin with sensor"
Set the return to origin sensor in accordance with the sensor
specifications. Also, check that the sensor mounting and the
cable connection of the sensor are correct.
(Position
error Alarm)
Position
error
counter
overflow
(1-108)
< Details >
Position deviation counter in the driver has overflowed during the
operation by pulse signals.
<Countermeasure>
Make sure there are no obstructions that interfere with the
actuator movement. Also, make sure that the load, speed,
acceleration and deceleration are within the range of the
actuators.

 Loading...
Loading...









