During activation of the Teaching Box stop switch, this signal
is ON. During the normal operation, it is OFF.
This is synchronized to the input for the EMG signal on the
controller PWR connector.
Alarm generated when abnormal conditions occur to the
actuator or its controlling status. OFF when there are no
alarms. ON in alarm condition.
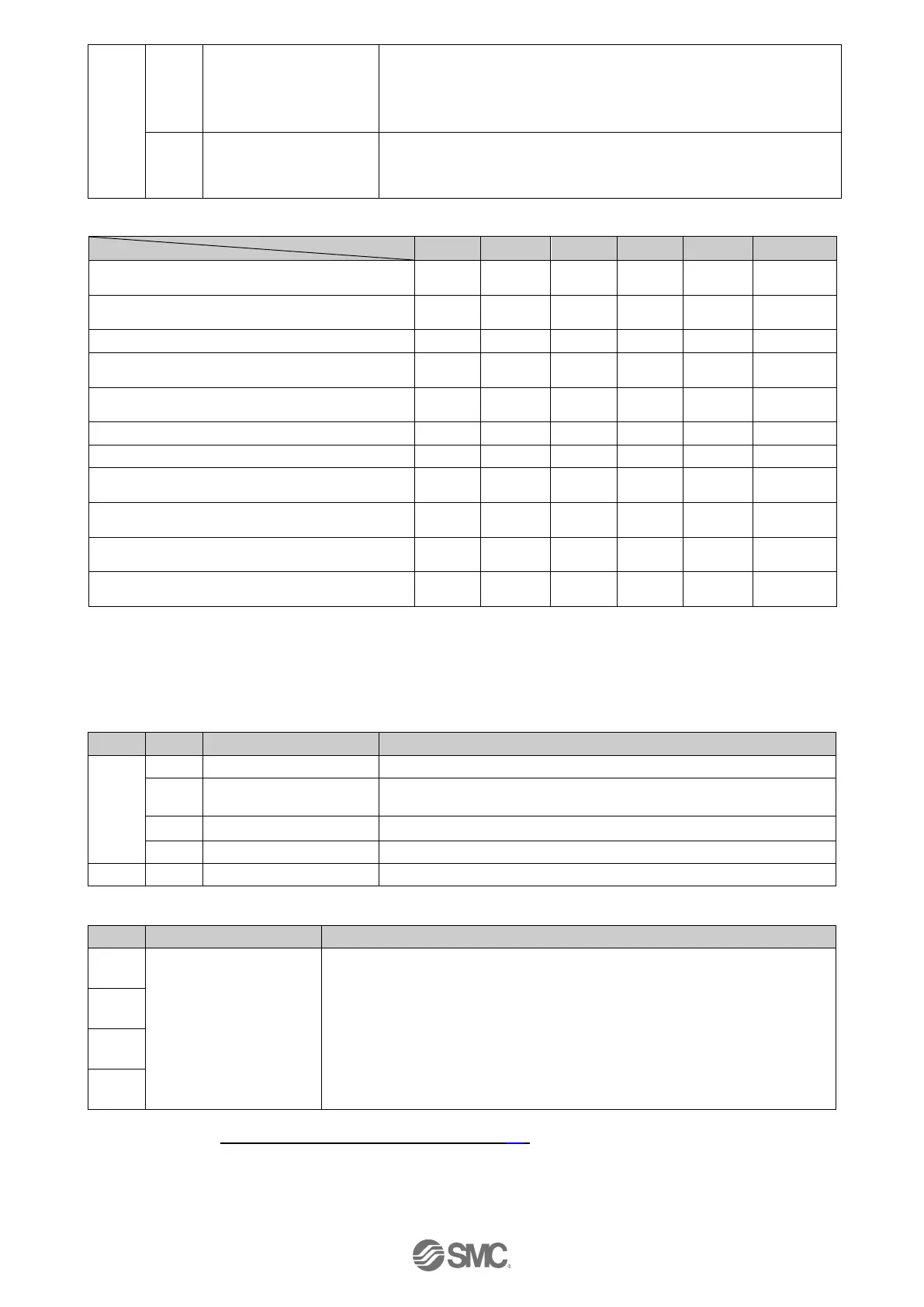
The table below shows the changes in the output signal with respect to the state of the controller.
During stopping when “SVON” is OFF after
turning ON the power supply to the controller
During stopping when “SVON” is ON after
turning ON the power supply to the controller
During returning to origin
The actuator is at the origin. On completion of
“SETUP”
During movement by positioning/pushing
operation
The actuator is paused by “HOLD”
On completion of the positioning operation
Stopped due to pushing a workload in pushing
operation
Stopped due to no detection of workload during
a pushing operation
During stopping when “SVON” is OFF after
returning to the home position
EMG signal stop from the PWR connector
when the actuator is at the origin
1 The signal turns ON when the actuator is within the range defined in the basic parameter setup.
2 The signal is updated on the transition of (ON → OFF) of the DRIVE signal.
3 Retains the previous state.
4 The signal turns ON when the actuator is "In position" according to the step data.
●Byte2,3: Controller information flag
READY turns ON when Servo is ON and no alarm is
generated. The READY flag turns ON.
●Byte4-7: Current position
Current position of the actuator is shown in multiples of 0.01mm when
numerical data can be read. (5)
E.g.) 800.00[mm](80000d=13880h) is output.
“Byte4” = 00h
“Byte5” = 01h
“Byte6” = 38h
“Byte7” = 80h
5 Please refer to 20. Handling of sent/received data (P.84) for handling of the data.

 Loading...
Loading...







