- 32 -
●Byte1: Input port equivalent signal details
This terminal is ON during the movement of the actuator
(during the positioning operation, etc.).
During the pushing operation without movement (no
movement but the actuator generating the pushing force),
“BUSY” is OFF.
When the servo motor is OFF, “SVRE” is OFF. When the
servo motor is ON, “SVRE” is ON.
When the actuator is in the SETON status (the position
information is established), this signal turns ON.
When the position status is not established, this signal is OFF.
The condition when “INP” turns ON depends on the actuator
action.
-Return to origin
Turns ON at the origin when within the ±"default in position" in
the Basic parameters.
-During positioning operation
Turns ON when the current position is within "Step data
position ± positioning range".
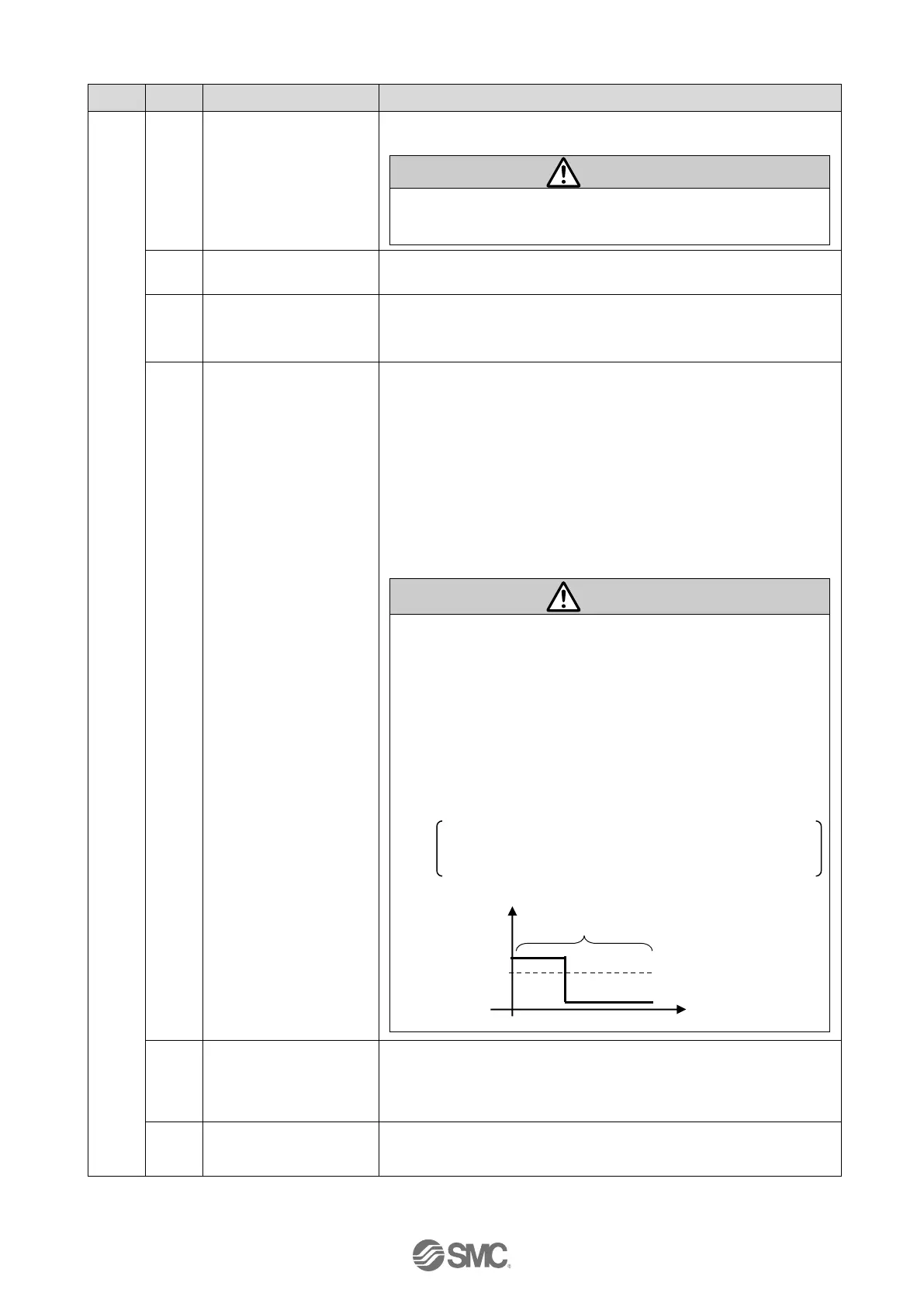
-During pushing operation
Turns ON when the pushing force exceeds the value set in
the step data "Trigger LV".
After the pushing operation is completed, even if it switches
automatically to energy saving mode, “INP” remains ON.
When movement starts again from the pushing stopped
state, pushing operation is repeated with the normal
pushing force.
(E.g.) Step data “force” is 100%
Step data “Trigger LV” is 80%
The energy saving setting of the actuator is 40%
The actuator model determines the energy settings.
Please refer to the manual of the actuator for more
details.
When the actuator is within the output range between Area1
and Area2 in the step data, this terminal will turned ON.
The area output setting range changes depending on the
active step data.
When the actuator is within the output range between "W area
1 and W area 2" of basic parameter, this terminal will turn ON.

 Loading...
Loading...







