Note. If syncout pulse length is measured in distance units and, for example, is equal to 10 stepper motor steps and
"syncout pulse on stop" mode is active, then the active state on synchronization output will be set on the movement
end, but will be cleared only when the motor will move 10 more steps during the next movement.
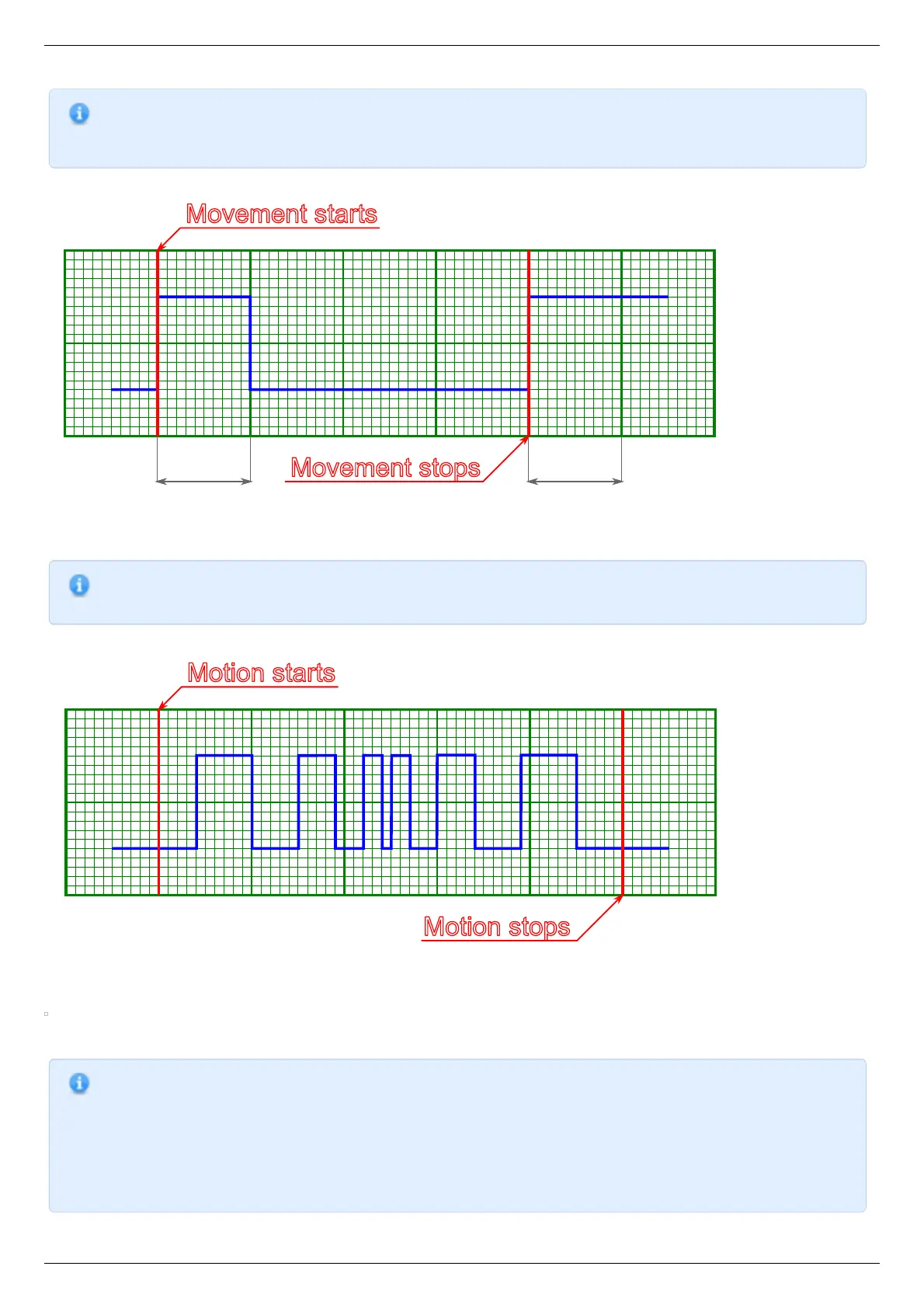
Syncout pulses generated on start and stop of the movement (pulse is measured in distance units)
Note. If you wish to reconfigure synchronization output and are not sure which state is it in, change its state to
general purpose output and set the desired logic level.
Sync out pulses on movement with acceleration and "generate on shift" mode (pulse length measured in distance units)
Sync out pulses on movement with acceleration and "generate on shift" mode (pulse length measured in microseconds)
Note. Periodic syncout pulse generation imitates revolution sensor with reducing gear. Coordinates which trigger
syncout pulse generation are counted from zero position and not from the position the controller is in at the start of
the movement. For example, if synchronization output is set up to generate pulses every 1000 steps then pulses will
be generated in positions 0, 1000, 2000, 3000, etc. Pulse generation works when moving in both directions. Pulse is
generated when the quotient of current coordinate and pulse generation period changes. That is, pulse is generated
when position 1000 is reached when moving in the direction of increasing position and it is generated when position
1000 is left when moving in the direction of decreasing position. Also, syncout pulse is always generated when
position 0 is reached from any direction (including the case when position is reset by the ZERO button).