SUNFAR C300 75
C300 series of non-sensor current vector-control inverter manual
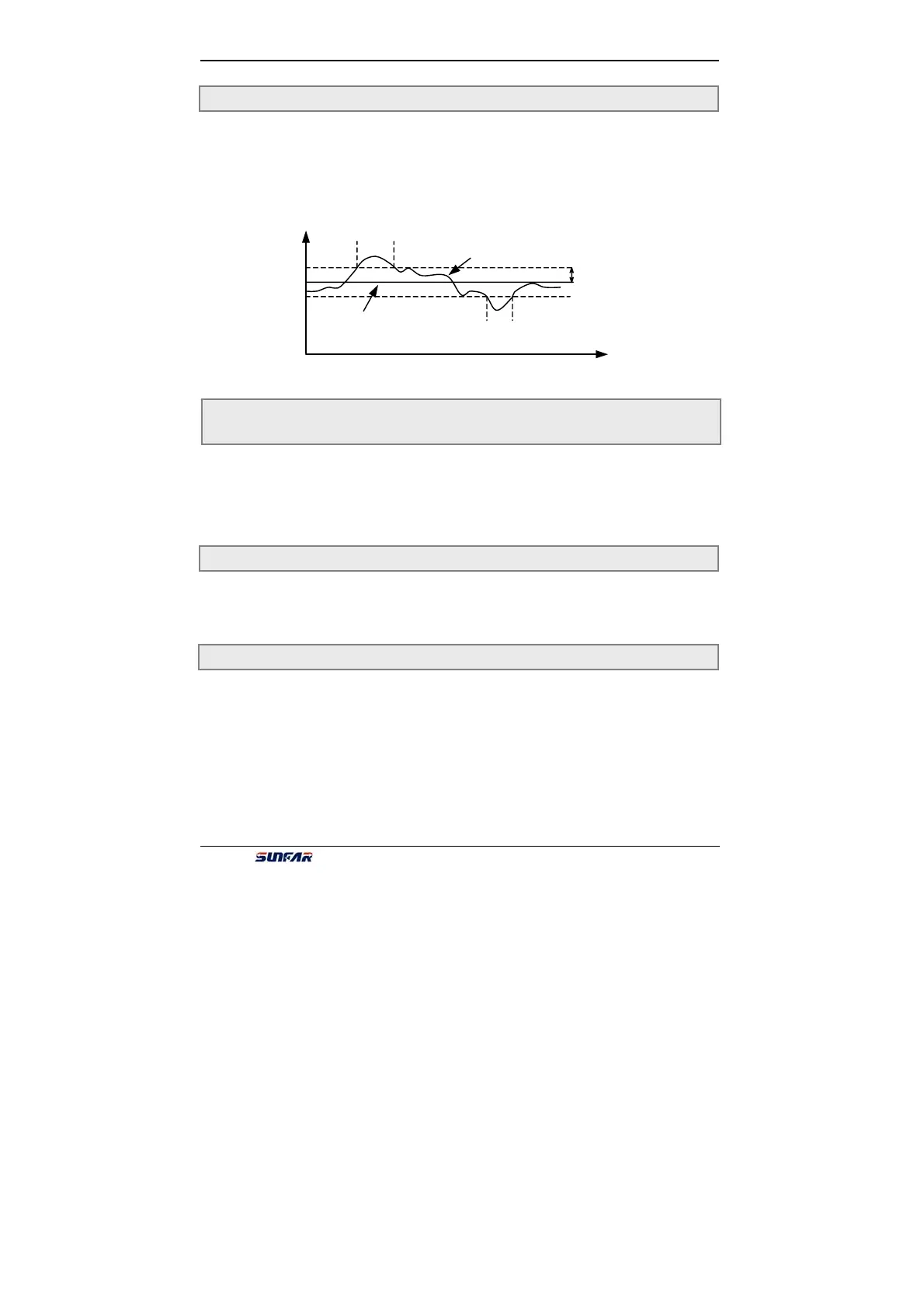
The parameter is the allowable deviation value relative to the setting max value.
When the difference between feedback value and the setting value is lower than
this setting value, PID controller will stop. Shown as fig.6-32.
This function is mainly suited to the system that has lower control precision and
needs to avoid adjusting frequently, for example, water-supply with constant
pressure system.
Those parameters define freq. and running time of inverter before actual PID
control is valid. In some control systems, inverters will forcible output a certain freq.
(F8.10) and keep it in setting time (F8.11) for controlled object arrives fast targeted
value. When controlled object almost arrives targeted value, PID controller will be
valid to improve response speed.
It defines feedback value while inverter goes to sleep state. When actual feedback
value is bigger than setting value and inverter arrives lower limit value, the inverter
will go sleep.
Shown as fig.6-33
It defines feedback value while inverter goes to work state from sleep state.
When actual feedback value is lower than setting value, the inverter will start to
work.
Shown as fig.6-33
F8.10 Preset freq. for close-loop Setting range:0.00 ~ the upper limit freq.
F8.11 Holding time of preset freq. for close-loop Setting range:0.0 ~ 6000.0s
F8.12 Sleeping threshold Setting range: 0.0 ~ 10.0
F8.9 Allowable deviation limit Setting range:0.0 ~ 20.0(%)
f
t
PID action
[F8.9]
PID action
PID setting
PID feedback
Fig.6-32 PID Control allowable deviation limit
F8.13 Awakening threshold Setting range:0.00 ~ 10.00