TRANSPORTATION AND INSTALLATION MANUAL
3.2.4 Installing the Robot
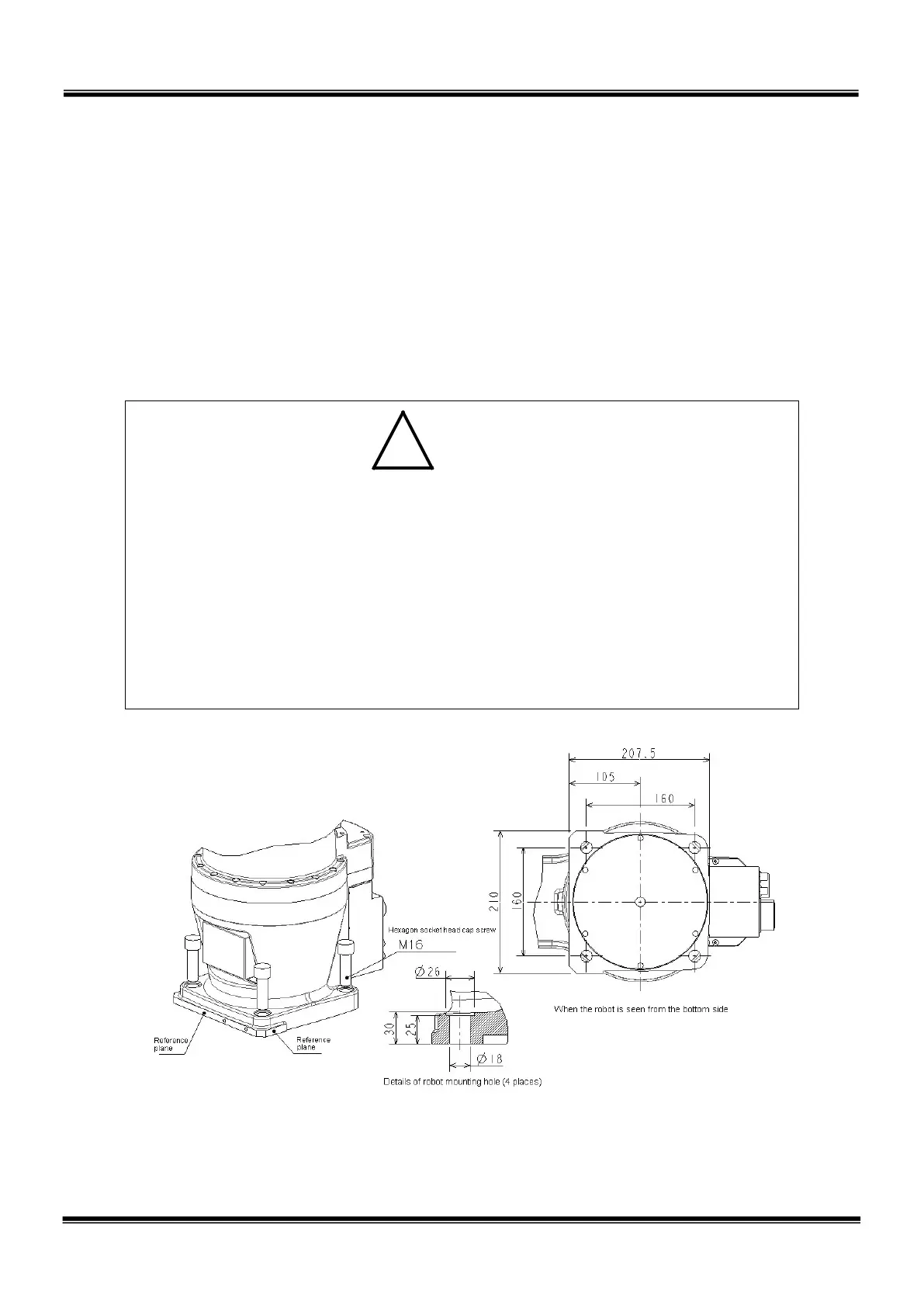
The robot is secured, using the set holes on the base (four (4) places). Use M16
hexagon socket head cap screws.
The robot installation method is shown in Fig. 3.4. Reference planes are provided on
the base unit.
To align the robot position in the base coordinate system, or to replace the robot,
provide adequate reference planes. Then, contact such reference planes to the base
reference planes and secure the robot.
• The robot will suddenly accelerate and decelerate during operation. When
installing it on a frame, make sure that the frame has sufficient strength and
rigidity.
If the robot is installed on a frame that does not have sufficient rigidity,
vibration will occur while the robot is operating, and could lead to faults.
When installing the robot on the floor, secure the robot with anchor bolts,
etc.
• Install the robot on a level place. Failure to do so could lead to a drop in
performance or faults.
Fig. 3.4 Setting method
STE 85305
– 26 –

 Loading...
Loading...





