TRANSPORTATION AND INSTALLATION MANUAL
5.3.3 Setting Maximum Speed and Robot Acceleration/Deceleration for Load Conditions
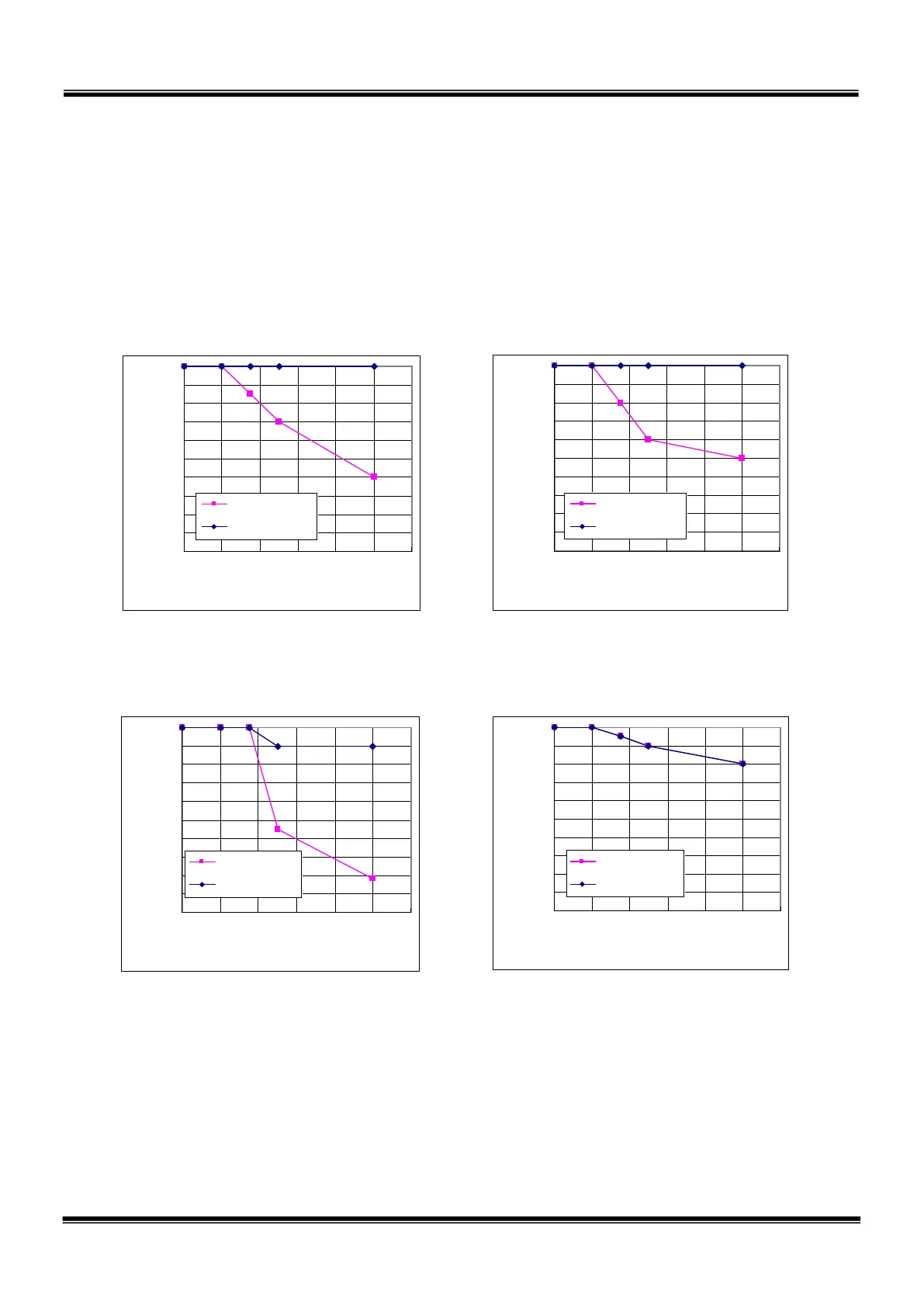
When the PAYLOAD command is used, the maximum speed and
acceleration/deceleration of the robot are automatically changed according to the load
conditions.
The maximum speed and acceleration/deceleration change with the load mass, as
shown in Fig. 5.9.
Setting of maximum speed and
acceleration/deceleration in relation to load
mass (Axis 1)
Setting of maximum speed and
acceleration/deceleration in relation to
load mass (Axis 2)
Setting of maximum speed and
acceleration/deceleration in relation to load
mass (Axis 3)
Setting of maximum speed and
acceleration/deceleration in relation to
load mass (Axis 4)
Fig. 5.9 Setting of maximum speed and acceleration/deceleration in relation to load
mass
0
10
20
30
40
50
60
70
80
90
100
0
2 4 6
8 10
12
Maximum speed (%) /
Acceleration/deceleration (%)
Acceleration/Deceleration
Maximum speed
0
10
20
30
40
50
60
70
80
90
100
0 2 4 6 8 10 12
Maximum speed (%) /
Acceleration/deceleration (%)
Acceleration/deceleration
Maximum speed
0
10
20
30
40
50
60
70
80
90
100
0 2 4 6 8 10 12
Maximum speed (%) /
Acceleration/deceleration (%)
Acceleration/Deceleration
Maximum speed
0
10
20
30
40
50
60
70
80
90
100
0 2 4 6 8 10
12
Maximum speed (%) /
Acceleration/deceleration (%)
Acceleration/Deceleration
Maximum speed
STE 85305
– 69 –

 Loading...
Loading...





